 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 [ 6 ] 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 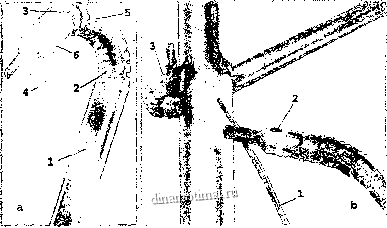
Рис. 2.7. Хирургический микроманипулятор, а - гибкий рабочий орган, b - рабочие органы в действии
ют четыре отверстия, через которые пропущены упругие нити 5, закрепленные на корпусе схвата 6, Изгиб гибкого вала осуществляется за счет вытягивания какой-либо упругой нити 5. Фиксация изотнутого положения достигается з2 счет приложения к остальным нитям одинаковых тянущих сил. Такое действие приводит к увеличению сил трения между ко.тьцами 2 и шариками 3. Приво; нитей может осуществляться как от микроэлектродвигателей, так и от пьезоприводов (в зависимости от размеров рабочего органа и соответственно от хода нити). Такие хирургические микроматшпуляторы могут работать в пар (рис.2.7 Ь), в этом случае кетгут 1 или игла с шовным материалом может пер

Рис. 2.8. ММС с сенсорной перчаткой управления
Таким образом, для обеспечения сложных движений желательно иметь не-колько рабочих органов на одном микроманипуляторе, которые могут рабо-
чем на предыдущем уровне - до 30 deg;. Микросхваты и иные подобные виды ра-хватываться или придерживаться во время операции поочередно либо одним бочих органов могут быть изготовлены методами фотолитографии, лазерной охватом 2, либо другим схватом 3. обработки, травления, электроэрозионной обработки. Наибольшие трудности при разработке таких микроустройств состоят в подведении энергии к их приводным элементам.
Для микрохирургических операций рабочий орган микроманипулятора должен иметь как минимум две степени свободы. Причем сопротивление, оказываемое биологическими тканями относительно большое: 10 - 10 Н. Размеры миниатюрного схвата ~ порядка 1x1x3 мм. Учитывая это, технологии годные для изготовления микроизделий, здесь мало применимы. Более разумно применять методы традиционной механообработки, электроэрозионной обработки микропроволокой, а также лазерной обработки. Примером может служить рабочий орган хирургического микроманипулятора для наложенш микрошвов на рассеченные ткани (рис. 2.7) [51]. Рабочий орган, установленный на модуле точных перемещений микроманипулятора, содержит цилиндрический корпус 1 диаметром 5 мм, к которому прикреплен гибкий элемент, Управление миниатюрными рабочими органами может осуществляться при обладающий двумя степенями подвижности (рис. 2,7 а). Он состоит из колец 2. омощи джойстика, выполненного в виде сенсорной перчатки, которая имеет между которыми находятся шарики 3 с центральными отверстиями, через ко- средства очувствления (рис 2 8) [51]. торые пропущена нить, приводящая в движение губку схвата 4. Кольца 2 име-
Табл. 2.1
Уровни иерархии | 1 (базовый) | |||
Количество степеней свободы, их виды | 3-4, 3 поступатель-ньк, 1 вращательная и более | Поступательные | Поступательные, вращательные | 1-2, Поступательные, вращательные |
Диапазоны перемещений | До 40 мм | До 20 мм | До 0,5 мм | До 0,1 мм, 30 deg; |
Диапазоны скоростей | 1 - 10 мм/с | До 0,2 мм/с | До 0,2 мм/с, 15 град/с | |
Точность позиционирования | plusmn;0,1 мм | plusmn; 0,05 мм | plusmn;0,5 мкм | plusmn;0,5 мкм |
. нахо-
тать в оператавной зоне одновременно с одним обьекшм, что свойственно вр 15 При такой компоновке влияние внешних вибраций на движе-сокоорганизовашшм живым существам в подобных ситуащшх. микромехаштзмов 8 относительно друг друга меньше, чем щ,и закрепле-
Примерше кинематические параметры уровней иерархии модулей МО д неподвижном столике.
приведены в табл. 2.1. , ,
Предложенная древовидная структура ММС аналогична структуре живого
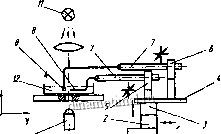
организма, тем самым она удовлетворяет бионическим принципам построения сложных систем. В своей практике человек часто держит в одной руке объект, а другой рукой манипулирует инструментом (например, вдевая нитку в иголку, человек автоматически сближает оба предмета одновременно и лишь в момент касания нитки и иголки он фиксирует положение нитки, продолжая медленное движение иглой). Насекомое также оперирует с объектом лапками (например, паук, поймавший муху, отсасывает из нее содержимое при помощи органа, находящегося на подвижной головной части тела). Здесь важно подчеркнуть, что достижение конкретной цели, то есть определенного относи-Примером использования щ)иведенной выше иерархии ММС может c.iy deg; взаимодействия объекта с ш1струментом, которые зафиксированы в жить схема работы с микрообъекгами, показаштая на рис. 2.9. По сравнешпо с Р deg; deg;Р laquo; многовариантность. Это дает возможность
традиционной схемой (рис. 2.1) она имеет один манш1улящ1онш.1Й блок, на ко- о альный сценарий движений в кошфетной ситуации, тором установлены последовательно три модуля грубых перемещений 1, 2,3 На подвижной части модуля 3 закреплена платформа 4. На ней установлены два одинаковых модуля точных перемещений 5 и 6, каждый из которых имеет три степени свободы. Выходное звено модуля 5 оснащено держателем 7, в котором находится сменный микросхват или иной микромеханизм 8 (например, миниатюрная игла, имеющая возможность поворачиваться на достаточно большой угол 15 deg; - 30 deg;). Выходное звено модуля 6 оснащено держателем 7, в котором находится сменный микромеханизм 8 (например, миниатюрная вакуумная присоска, имеющая возможность также поворачиваться на угол 15** -30 deg;). При помощи двух джойстиков 9 и компьютера 10 оператор может управлять движением, как объекта исследования, так и рабочим органом. Оперативная зона освещается источником света 11. Оптический сигнал, проходя через прозрачную кювету 12 и объектив 13 и отражаясь от зеркала 14, поступает на 40 41
S 1 | |||
(Г IT | |||
Рис. 2.9. Схема работы с микрообъектами при помощи ММС, имеющей разветвленную структуру
дорными размерами датчиков усложняет задачу создания ММС. При обычной Таким образом, распределение функций и их параметров (диапазонов пер еме построения системы управления сигнады с датчиков поступают в блок мещений, скоростей и точностей позиционирования) по уровням иерархии, управления, располагающийся отдельно от механического блока. В связи с также разветвленная структура ММС позволяют повысить ее гибкость, эффе миниатюрными размерами приводов ММС аналоговые сигнагп gt;1 обратной свя-тивность и надежность: увеличить оперативную зону микроманипулятора nf и управляющие сигналы оказывают взаимное влияние, что резко ухудшает малых его габаритах, повысить точность отработки заданных движений. достоверность информации и управления. Поэтому логично было бы располо-На основе анатза структуры ММС можно сделать следующие выводы, жить преобразователи аналоговых сигналов, поступающих с датчиков, в дис-Манипулирование с микрообъектами позволяет применить древовидну кретные непосредственно рядом с датчиком, т.к. достоверность передачи дис-иерархическую структуру ММС. кретных сигналов на порядок выше, чем аналоговых. Такое решение приводит
Древовидная структура ММС с числом рабочих органов не менее дву к появлению следующего технического противоречия: для повышения точно-находящихся на разных модулях точных перемещений, позволяет npi сти всего микропривода необходимо оснастить датчики преобразователями менить бионический принцип манипулирования с объектами сигналов в непосредственной близости от них, что при этом не должно приво-инструментами. дшъ к увеличению габаритов ММС. Преодоление этого противоречия воз-
Древовидная структура ММС позволяет осуществить многовариан: можно двумя путями.
ность взаимодействия объекта с инструментом и найти оптимальный да - Использование оптических систем передачи информации: подвижная данной ситуации вариант. часть модуля оснащается зеркалом, а оптический сигнал воспринимается
Древовидная структура ММС позволяет повысить надежность всей си( датчиком, расположенным на неподвижной части ММС. Такие системы темы в целом при отказе отдельных ее элементов с неподвижными датчиками могут определять координаты (перемеще-
Манипулирование на уровне десятых долей миллиметра и меньше п( ния) подвижных элементов.
зволяег создавать модули точных перемещений с тремя степенями св( - Использование миниатюрных интегральных электронных устройств (в боды, что повышает компактность системы и ее универсальность. том числе оптоэлектронных), кремниевые подложки которых являются
несущими элементами упругих механических систем. Такие системы 2.2. МЕХАТРОННЫЕ МОДУЛИ МИКРОПЕРЕМЩЕНИЙ дают информацию о механических напряжениях, деформациях и уско-
рениях. Ниже будет показано, что пьезоэлектрические преобразователи с
ММС в связи с чрезвычайно малыми перемещениями рабочих органов (д
использованием пьезокерамических элементов способны эффективно
0,1 мм) и высокими требованиями к точности отработки их движений (до plusmn;0,
решить поставленную задачу.
мкм) должны быть оснащены высокочувствительными датчикам обратно t,
Наиболее перспективное направление в этой области состоит в разработке
связи. Одно из главных требований к ним - это минимальные габариты, позвс
laquo;схатронных микромеханических модулей (ММ), из которых образуется ляющие встроить датчики в элементы микромеханической системы. Сочет! хдх
ivuvic. Суть мехатронного подхода к проектированию заключается в интегра-
ние высокой точности и достоверности информации обратной связи с минй
| 1 2 3 4 5 [ 6 ] 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |




