 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 [ 5 ] 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
приводов. На модуле 4 установлен держатель 8, в котором зафиксирован рабо-
чий орган - игла 9.
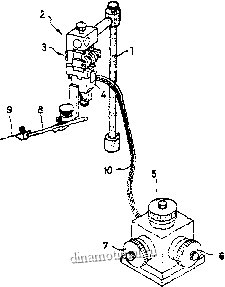
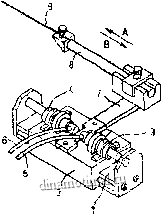
Рис. 2.2. ММС с пщ)авлическими приводами
Каждый модуль такой ММС может иметь следующее конструктивное решение (рис. 2.3). Он имеет основание 1, относительно которого по направляющим скольжения двигается каретка 2 за счет двух миниатюрных гидроцилиндров 3, 4. Штоки гидроцилиндров 3, 4 закреплены на основании 1 корпуса - на каретке 2. При движении в направлении А рабочая жидкость подается через трубку 5 в гидроцилиндр 3, а из гидроцилиндра 4 рабочая жидкость вытекает по трубке 6 через дроссель, создавая тем самым постоянное сопротивление движению каретки. При движении в направлений В работа цилиндров меняется. Такое техническое решение позволяет уменьшить влияние трения скольжения при реверсе, однако, при перемещениях порядка 1 мкм возможны скачкообразные рывки каретки 2 с держателями 7, 8 и рабочим органом 9.
Рис. 2.3. Модуль с гидроприводом
Друтим примером приведенной выше структуры ММС может служить микроманипулятор, предназначенный для офтальмологических операций [21]. Инструментом для микрохирургии служит микроканюля, через которую к сосудам глазного нерва подается лекарство (рис. 2.4).
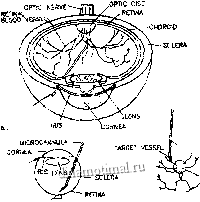
laquo;!ICROCAK gt;tULA
optic Disc
OPTIC
Рис. 2.4. Схема офтальмологической операции с помощью микроманипулятора
в этой ММС (рис. 2.5) микроманипулятор 1 выставляется и фиксируется относительно оперативной зоны внутри склеры глаза (размеры этой зоны примерно 1x1x1 мм) при помощи многозвенной рычажной стойки 2 на основании 3, Сам мйкроманипулятор имеет одну поступательную степень свободы, осуществляющую подачу рабочего органа к кровеносному микрососуду. Движение инструмента осуществляется при помощи гидропривода 4, в который рабочая жидкость поступает по трубке 5. Лекарственный препарат вводится в кровеносный сосуд через микроканюлю 6 при помощи шприца 7.
Этот пример показывает, что при такой сложной настройке базового модуля, когда выставление рабочего органа относительно оперативной зоны происходит вручную при помощи многозвенной рычажной стойки 2, функциональные возможности микроманипулятора явно недостаточны для проведения операций подобного типа из-за ограниченности подвижности рабочего органа. Для точного попадания микроканюли б в кровеносный микрососуд необходимы как минимум еще два степени подвижности.
Исходя из различия требуемых параметров движения и позиционированш при указанных режимах, а также из различий в степени автоматизации перемещений предлагается разделить ММС на четыре уровня (рис. 2.6).
Первый уровень - базовый. Модули для установки блока модулей на основную позицию, которая не меняется в течение продолжительного времени т.е. осуществляется привязка всего микроманипулятора к остальному технологическому оборудованию. Например, для биологических исследований - laquo; контейнеру с биообъектами, к блоку сменных рабочих органов, к области растра микроскопа. Здесь подходят конструктивные решения с иcпoльзoвaниei массивных (относительно последующих модулей) установочных механиче ских передач, которые в редких случаях могут быть оснащены электроприво дами. В основном они устанавливаются и выставляются вручную с использО ванием обычных измерительных инструментов: штангенциркуля, микрометре плиток Иогансона. Наиболее практично перемещать блоки модулей на рас
стояния до 40-50 мм и на угол в горизонтальной плоскости до 90 deg;, т.к. для большинства биологических микроскопов предметные столики имеют перемещения в указанном диапазоне. Количество степеней подвижности может быть равно 3-4 (например, выставление ММС по координатам x,y,zjip).
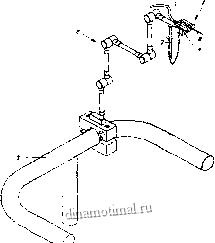
Рис. 2.5. Микроманипулятор для офтальмологических операций
ГРоВочийчван j
(3 кпорацдшы)
1 Робочшсргон I
РоВочшоргш
Мо8ул. mvm. переиещвш
4 уровень
(3 коорашашм)
3 уровень
Плошфорт
Mgajib грубых перенаденцО (zj МсЭаль грубых rqiEHEiaeHuulyl Тмцль грубых переиацетО (х I HtudDHHULi твиль (3 кфшм) \
Рис. 2.6. Древовидная структура ММС
2 уровень
1уроввмь
Для ММС, применяемых в микрохирургии, количество степеней подвижност, g.g 0,2 мм/с - она соответствует реакции человека-опреатора при про-может достигать 8-10 в связи с тем, что необходимо установить последующи, длжительной работе с микроскопом [24]. Однако в настоящее время уровень модули в удобном для хирурга положении относительно оперативной зоны, отизащи и обработай визуальных сигналов позволяет оперировать в ра-Второй уровень, характеризующий режим грубых перемещений, включае; gg скоростями до 0,5 мм/с. Такие малые перемещения позволяют точные электроприводы с использованием винтовых, ленточных, рычажны, .уществить их по трем координата при помощи одного модуля (исследова-передач, а таюке гидравлических передач. При использовании гидравлически, приведено ниже). На платформе могут быть размещены не-
передач движение от шагового электропривода передаетея на гидрощшинд: перемещеш1Й, осуществляющих маш1пулирование
или упругий сильфон, заполнешгый жидкостью, далее по тонкому, но жестко объектами одновремешю. При наладке эти модули должны иметь му трубопроводу жидкость выдавливается в аналогичный гидроцилиндр илр возможность точной установки ( plusmn;0,05 мм) относительно друг друга по двум сильфон, установлешый непосредственно вблизи объекта манипулирования координатам на расстояние порядка 5 мм. Например, один рабочий орган, ус-Здесь могут быть задейстъованы как ручной, так и автоматический режимы овленшлй на первом модуле точных перемещений, оперирует с объектом Перемещеши на втором уровне иерархии - до 20 мм (половшта хода базовой ..едоващтя - биологической субстанцией, другой рабочий орган, устшов-уровня) со скоростями 1 - 10 мм/с при точности позищюшфования plusmn;0,05 мм зором модуле точшлх перемещений, оперирует с инструментом соответствующей минимальной длине объекта исследования. Они могут осу исследоваш1я, а третий рабочий орган, установлештый на следующем мо-ществляться щ)и смене одного объекта манипулирования другим. Каждый из точных перемещеш1Й, деформирует объект исследования, помогая вто-модулей имеет одну степень свободы (обычно поступательную). Последова- рому рабочему органу выполнять определештые операцш raquo;. Такая параллельная тельно соединенш gt;1е три таких модуля обеспечивают три степени свободы пс структура позволяет тфоизводить также сборку микроизделий, осуществляя следующих модулей точных перемещений, установленных на платформе одновременное движение как одним, так и другим изделием. Смена объектов Третий уровеш. ММС осуществляет точные перемещештя - это собствеш10 манипулирования достш-аетея за счет движения модулей второго уровня отно-манштулирование рабочими органами (схватом, иглой, вакуумной присоской f сительно контейнеров, находящихся в зоне досягаемости этих модулей, т.е. на т д.) в оперативной зоне системы. Здесь можно использовать пьезоэлектриче- расстоянии не более 20 мм.
ские, электростатические приводы, точность позициошфования которых дос- Наконец, последний четвертый уровень - это модули приштипиально новых тигает plusmn;0,5 мкм. Ход рабочего органа не более 0,5 мм этот параметр можно д современного состояшм микротехники возможностей манипулирования обосновать следующим. Во-первых, такое перемещение полностью перекры- микрообъекгами; мшфомеханизмы на базе МЭМС, позволяющие осуществ-вает размер самого объекта и в принщтпе возможна установка трех объектов с ять микроперемещения элементов сменного рабочего органа - пальцев схва-указанными габаритами в одну линию, что позволяет рабочему органу совер- та, запястья схвата, перфорационшлх перемещений или качаний иглы и т.д., шать точные манипуляции, перенося фрагменты объектов от одного к друго- размеры которых не более 0,1 мм. Здесь ход рабочего органа может быть ме-му. Во-вторых, перечислешгые типы приводов могут работать в указашто raquo; нее 0,1 мм при максимальной погрешности позиционирования plusmn;0,5 мкм, од-диапазоне с требуемыми точностями. Максимальная скорость рабочего органа нако, углы поворота элементов рабочего органа должшл быть намного больше, 36
| 1 2 3 4 [ 5 ] 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |




