 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [ 23 ] 24 25 26
Как было указано выше, рессора АУЛ при подаче напряжения изгибается с перегибом в средней ее части. Очевидно, что такая упругая система будет работать эффективнее, если БПП, содержащийся на рессоре, будет разбит на две симметричные части (рис.6.13.а) и подключен к источншд напряжения проти-вофазно. Такого же эффекта можно достичь, если направление поляризации ПКП на первом БПП (Pj) и втором БПП (Р) противоположны. В этом случае на оба БПП подается напряжение одного знака (рис. 6.5 Ь).
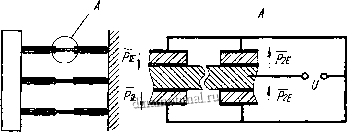
Рис. 6.13. АУЛ с рессорами, содержащими по два БПП на каждой
Для определения перемещения платформы такого АУЛ рассмотрим две рессоры с БПП, имеющие одинаковую длину Ljl и несвязанные между собой. При подаче на них одинакового электрического напряжения, перемещения свободных концов рессор в точке 0. - 4in и в точке 0 - будут равны, но направлены в противоположные стороны (рис.6.14 а). Как и в предыдущих случаях заменим действие напряжения действием эквивалентных изгибающих моментов Mg. Эти две рессоры можно совместить в точке О свободными концами, т.к. они не оказывают воздействия друг на друга (рис.6.14 Ь). В этом случае, используя формулу (6.39), получим перемещение заделки второй рессоры относительно заделки первой рессоры
4 = 24, = 2, = M,L% {\-k)k, (6.47)
Ij =l/L.B частном случае гфи = 0.5 перемещение платформы
, - eL%
Сравнивая это выражение с (6.45), видим, что перемещение платформы в последнем случае в два раза больше, чем в случае, когда БПП занимает только половину длины рессоры (при = А), но в 4 раза меньше, чем в случае консольно закрепленного БПП.
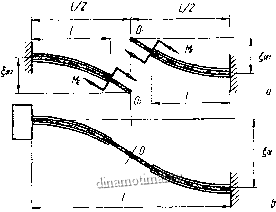
Рис. 6.14. Расчетная схема рессоры с двумя БПП, а - рессоры с одним I БПП и свободным концом, b - рессора с двумя БПП
I 6.5. ОЦЕНКА БЫСТРОДЕЙСТВИЯ МОДУЛЕЙ
Для оценки быстродействия модуля микроперемещений необходимо определить собственную частоту упругой системы. АУП можно представить как упругую систему с сосредоточенными параметрами. Тогда собствешая частота определяется по формуле
где т - масса платформы, если масса платформы на много больше массы рее-сор с БПП.
Быстродействие оценивается по величине постоянной времени г. Физическая супщость этой величины заключатся в том, что упругая система отрабатывает ступенчатое воздействие (например, скачкообразная подача напряжения) за период времени, приблизительно равный г. Постоянную времени можно найти по формуле
Для приведенного выше АУП массу платформы возьмем т = 0,\кг. с, = 9,0-10Н/м, тогда / =150 Гц. т = 1,7 мс.
Таким образом, модули микроперемещений с БПП можно рассчитывать, применяя метод эквивалентных моментов. В этом случае задача нахождения перемещений выходного звена сводится к определению упругих деформаций и прогибов упругой системы.
Анализ активных упругих устройств, предназначенных для поступательного перемещения, показывает, что наиболее эффективна конструкция АУП, содержащая два симметрично расположенные БПП на каждой рессоре. Сравнивая его с одиночным консольно закрепленным БПП, можно констатировать, что коэффициент жесткости одной рессоры АУП в 4 раза выше, чем у консольного БПП. Наращивание силовых характеристик модуля наиболее эффективно путем увеличения количества рессор с БПП, соединенных параллельно
Глава 7. РАСЧЕТЫ ДЛЯ ПРОЕКТИРОВАНИЯ ДВУХКООРДИНАТНЫХ МОДУЛЕЙ С БИМОРФНЫМИ ПЬЕЗОПРИВОДАМИ
Рассмотренные выше упругие системы с БПП осуществляют траектории движения выходного звена в одной плоскости, что часто недостаточно. В современных оптических системах часто требуется угловое сканирование в двух плоскостях [35, 40]. Сложность расчета таких систем состоит в том, что упругие связи смежных приводов оказывают сопротивление движению выходного звена при работе привода рассматриваемой степени свободьт
7.1. УГЛЫ КАЧАНИЯ ДВУХКООРДИНАТНОГО СКАНЕРА
Задачей расчета двухкоординатного сканирующего устройства (рис. 4.16) является огфеделение зависимостей углов сканирования от параметров упругой системы и напряжения, подаваемого на БПП, а также оптимизация параметров системы с целью достижения максимума углов сканирования при фиксированном значении амплитуды натфяжения и общих габаритах устройства.
Данная упругая система имеет относительно жесткие элементы: плоские рессоры с БПП 1, 2 и зеркало 3, а также относительно нежесткие элементы -упругие стержни 4. Будем считать, что рессоры с БПП имеют бесконечную жесткость на кручение, а зеркало - абсолютно жесткое тело. При одновременном отклонении зеркала в двух плоскостях все четыре упругих стержня будут испытывать гфостранственный (сложный) изгиб, причем направление векторов сил будет также меняться. Для сохранения постоянного упругого сопротивления внешним воздействиям эти стержни должны иметь круглое сечение, поэтому важным фактором, влияющим на углы поворота зеркала, будет отношение диаметра упругого стержня к его длине. Задачей расчета является также исследование влияния этого отношения на угол поворота зеркала.
в качестве расчетной схемы сканера можно принять статически неопреде-лимую упругую систему (рис. 7.1 а), состоящую из одной рессоры с БПП, упругого стержня и половины зеркала. Внещним воздействием на нее будет эквивалентный момент М, соответствуюпщй действию электрического напряжения и, подаваемого на БПП. В этой системе в точке качания зеркала О будет действовать момент сопротивления , возникающий вследствие скручивания перпендикулярных плоскости рисунка упругих стержней (на схеме не показаны) в точке 0. Они связывают пьезоприводы, не участвующие в повороте зеркала в плоскости рисунка, с зеркалом. пропорционален углу поворота зеркала . Разобьем упругую систему на две, заменив отброщенные части реакциями (рис.9.4 Ь, с).
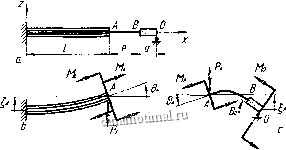
Рис.7.1 .Расчетная схема двухкоординатного сканера; а - общая схема, b - схема рессоры с БПП, с - схема половины зеркала с упругим стержнем
Реакции, действующие вдоль оси х не учитываем, т.к. изгибающие моменты, возникающие при их действии, крайне незначительны вследствие малости углов поворота сечений (не более 3 deg;). При указанном направлении оси х угол поворота рессоры с БПП в точке А
(7.1)
где Яд - податливость сечения БПП, и 7 - реактивный момент и реакция в точке А со стороны отброщенной части системы. Перемещение точки А по оси Z
Я,1-Я,1\
(7.2)
2 3
Для второй части упругой системы, состоящей из упругого стержня и половины зеркала, напишем уравнение статики;
Р{е+а) = М,+М,. (7.3)
Т.к. мы рассматриваем только половину упругой системы сканера, то угол поворота зеркала
Оо = -М,еЯ,, (7.4)
где /1, - крутильная податливость сечения упругого стержня. Отметим, что
знак laquo;- raquo; в формуле (7.4) поставлен по причине того, что поворот зеркала на данной схеме осуществляется по часовой стрелке (положительное направление поворота - против часовой стрелки). Крутильная податливость сечения /1, связана с изгибной податливостью сечения упругого стержня следующим соотношением
Лр=(1 + А.)Я.= (7.5)
где fi - коэффициент Пуассона для материала упругого стержня, т.к.
где - модуль сдвига, Е - модуль упругости материала упругого стержня. Изгибная податливость сечения круглого стержня определяется известной формулой
(7.6)
Где rf, = -, й? - диаметр упругого стержня. е
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [ 23 ] 24 25 26 |




