 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 7 8 9 10 11 12 13 14 [ 15 ] 16 17 18 19 20 21 22 23 24 25 26 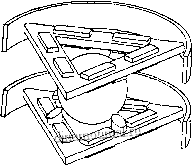
Рис. 4.20. Многокоординатаый сферический пьезодвигатель
Таким образом, применение БПП в качестве приводов микроперемещений позволяет укоротить кинематические цепи модулей вследствие того, что БШ являются как элементами преобразования электрической энергии в механическую, так и элементами упругих передаточных механизмов.
Из модулей микроперемещений с БПП могут быть составлены последовательные цепи в СМП. В таком случае выходное звено получает несколько степеней свободы. Параллельное соединение рессор с БПП позволяет повысить силу привода на выходе. Кроме того, такое соединение БПП позволяет создать компактные многокоординатные микромеханические модули с параллельными кинематическими цепями. I
Глава 5. РАСЧЕТЫ ДЛЯ ПРОЕКТИРОВАНИЯ МОДУЛЕЙ С СОСТАВНЫМИ И ТРУБЧАТЫМИ ПЬЕЗОПРИВОДАМИ
5.1. УРАВНЕНИЯ СОСТОЯНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОЙ СРЕДЫ
В основе всех расчетов перемещений и силовых нагрузок выходных звеньев модулей с пьезоприводами лежат уравнения, описывающие состояние пьезоэлектрической среды под действием электрического поля и внешних механических нагрузок.
В матричной форме линеаризованные уравнения обратного пьезоэффекта для малых объемов пьезоэлектрической среды можно представить следующим образом [8]
S = sT + d,E, (5.1)
где S и Г - механические деформации и напряжения, Е - напряженность электрического поля, - постоянные податливости, uf, - транспонированная
матрица пьезомодулей, верхний индекс - означает измерение константы при постоянной напряженности электрического поля (это связано с тем, что в рассматриваемых пьезоприводах распределение зарядов на электродах равномерное). Известны и другие представления уравнений обратного пьезоэффекта, однако, для рассматриваемых пьезоприводов уравнения (5.1) наиболее приемлемые. Для пьезокерамических материалов их можно представить в развернутом виде таким образом.
(5.2)
3. | |||||||||||||
*66. |
где 8,82,83 - деформации растяжения-сжатия, 8,8,8 - деформации сдвига, 7,Г2,Гз - главные (нормальные) механические напряжения (растяжения-сжатия), Т,Т,Т - сдвиговые напряжения, s,...sf, - постоянные податливости для различных условий состояния пьезосреды, d,d,dj - пьезомодули дом различных условий состояния пьезосреды (их значения приведены в справочниках, например [28]). Направления осей, обозначенных цифрами 1, 2, 3, соответствует рис.3,1 и совпадает с индексами параметров уравнений (5.2). Отметим, что явление гистерезиса здесь не учитывается.
Для пьезоэлектрических элементов, имеющих толщину (размер по оси 3) намного меньшую, чем остальные размеры уравнения (5.2) существенно упрощаются. Физический смысл упрощения заключается в том, что сдвиговыми деформациями и напряжениями идя тонких пластинок можно пренебречь.
6.2. СОСТАВНОЙ ПЬЗОПРИВОД
Рассмогрилт составной пьезопривод (рис. 3.5)., состоящий из пакета пьезокерамических шайб, стянутых шпилькой. Напряжение подается так, как показано на рис.3.6. Рассчитаем перемещение рабочего торца пьезопривода в статическом режиме. Пусть левый торец преобразователя закреплен, а правый может поступательно двигаться вдоль своей оси (рис.5.1). На него действуют сила предварительной затяжки Р, создаваемая резьбовой шпилькой, и сила полезного сопротивления внешней нагрузки Р. При подаче электрического напряжения U толщина пьезокерамическои шайбы hp либо увеличивается, либо уменьшается в зависимости от полярности прикладьгеаемого нагфяже-ния. Для определенности будем считать, что она увеличивается и преодолевает сопротивление внешней нагрузки. Преобразователь состоит из п пьезокерамических шайб. Следовательно, общее перемещение торца преобразователя в п раз больше, чем изменение толщины одной пьезошайбы.
Пусть толщина пьезошайбы во много раз меньше ее диаметра. Напряжение и подается на электроды, расположенные на плоских поверхностях пьезо-шайб, поэтому направление оси с номером 3 совпадает с осью пьезопакета, Очевидно, что и направление внешней силы Р также совпадает с этой осью. Тогда в уравнениях обратного пьезоэффекта (5.2) переменные Si,82,Tj,T2,T,T,T,E,E2 = 0. В этом частном случае уравнение обратного пьезоэффекта будет иметь вид
iSj - Гззз + й?зз з ,
(5.3)
где S3- относительная деформация одной пьезошайбы в осевом направлении, Гз - механическое напряжение в осевом направлении, возникающее в ней, 53 -податливость пьезокерамики, 33 - пьезоэлектрический модуль пьезокерамики при действии электрического напряжения в направлении деформации.
(5.4)
где Е - напряженность электрического поля тфи действии электрического напряжения и,.
-----f D
Рис. 5.1. Расчетная схема составного пьезопреобразователя
предварительном затягивании резьбовой шпильки пакет пьезошайб сжи-**ается и правый торец перемещается влево на величину
Рр Ер
где Qp = -(Д -D2) - площадь торцевой поверхности пьезощайбы, У33 - мо-4
дуль упругости пьезокерамики при действии силы вдоль оси преобразователя. Для линейной модели пьезосреды (5.3) усилие предварительной затяжки не имеет значения, поэтому при подаче напряжения уравнение статики для пьезощайбы будет иметь вид
7зОр=-Р-ГА gt; (5-5)
где - дополнительное механическое напряжение в резьбовой шпильке, появляющееся из-за деформации пьезошайбы, которая возникает при подаче напряжения и, Q = - площадь поперечного сечения тонкой цилиндрической части резьбовой шпильки (Д - диаметр цилиндрической части шпильки). Закон Гука для резьбовой шпильки при подаче напряжения имеет вид
Tm=EuS, (5-5)
где Е - модуль упругости пшильки, Sj - ее относительная деформация, которую можно выразить через перемещение торца пьезопреобразователя:
(5.6)
где Ьр - общая длина пакета пьезошайб. Подставив (5.4) - (5.6) в уравнение обратного пьезоэффекта (5.3), получим
1 4- - - F
-Ьр.
Выражение (5.7) можно представить в виде
(5,7)
где = -
1 , г- 9ж
1 + ЗЗ. Q
\ + sE
1 + 33A.
Как видно из (5.8) перемещение рабочего торца пропорционально подаваемому электрическому напряжению, причем увеличение силы затяжки и внешней нагрузки уменьшает его. В частном случае, когда О, максимальная сила, которую может развить преобразователь, т.е. блокирующая сила, определяется по формуле
Р =d -Qp Ъз р
(5.9)
Пьезокерамика - хрупкий материал, поэтому пьезошайбы необходимо проверить на прочность при сжатии:
р +р
где 7зшщ=~- максимальное механическое напряжение сжатия, [Т] -Ир
допустимое механическое напряжение сжатия для пьезокерамики. Обычно си-
лу затяжки выбирают из условия - ~ 5 10* -г 3 -10 Н/м [8]. Из неравенства и
(5.9) следует, что
и lt;
S hp
laquo;зз
Из этой формулы можно определить максимально допустимое электрическое напряжение, подаваемое на пьезопреобразователь, при заданных остальных параметрах. Практика показывает, что ограничение напряжения основывается не на прочности пьезокерамики, а на допустимой напряженности электрического поля [ 3], при превышении которой может произойти деполяризация пьезокерамики:
[Ез]
Для большинства пьезоматериалов [ 3] лежит в диапазоне 1,0-1,5 кВ/мм. Характеристика = f{U) линейна при рабочем напряжении до 0,3-U, поэто-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 [ 15 ] 16 17 18 19 20 21 22 23 24 25 26 |




