 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нелинейная электромеханика
1 2 3 4 5 6 7 [ 8 ] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118
30 Глава 1. Описание электромеханических систем
Предыдущее распространяется и на laquo;магнитно-нелинейные raquo; электромеханические системы при условии, что гистерезисом можно пренебречь. При этом выражение для Т будет отличаться от принятого ранее лишь тем, что вместо квадратичной формы Ti в него войдет иного вида функция токов. Поэтому достаточно показать, что форма
-TJrTJs (1.3.10)
dhrdh,
r,s=l
положительно-определенная. Ограничимся случаем, когда векторы индукции В и напряженности поля Н в магнетике параллельны, а функция В{Н) возрастающая. При параллельных В и Н
Ti{hu...,hm) = j dv j B{H)dH, (1.3.11)
где первый интеграл берется по всему пространству. Пайдем приращение ATi = Ti{h -\- rj) - Ti(/i), удерживая квадраты /71,..., /уш- Обозначим через АН = H.{h-\-rj) - H(/i) приращение напряженности поля. Сохраняя члены второго порядка относительно АН, получим
/Лх.лхх Я2(АЯ)2 - (НАН)2 ЫЯ /HAhV
(1.3.12)
В магнитно-нелинейном случае АН включает не только первые, но и старшие степени приращения токов. По из соотношения [45]
ВАШ; = Фт), (1.3.13)
где Ф - магнитный поток через контур г-го тока, следует, что интеграл от ВАН - линейная форма rji,... ,rjm- Поэтому значение формы (1.3.10) найдется из двух последних членов в (1.3.12), если заменить в них АН на часть АН, линейную по /71,... ,/7т- Эта часть исчезает только при /71,...,/7т = 0. Учитывая вид последних членов в (1.3.12), заключаем, что форма (1.3.10) положительно-определенная.
В случае циклических координат судить об устойчивости стационарного движения по устойчивости равновесия позиционной подсистемы можно с помощью теоремы Рауса, обобщенной Ляпуновым, и дополнений к ней [69]. В этом случае, однако, постоянными считаются циклические импульсы, а не скорости. Условия устойчивости, получающиеся с помощью теоремы Рауса, шире, чем условия устойчивости для той же системы, но с квазициклическими координатами.
sect;1.3. Устойчивость стационарных двиэюений систем 31
Покажем это для случая 17 = 0. Обозначим через pi,...,Pm циклические импульсы, а через Vr = И + Ti (р, и) измененную по Раусу силовую функцию. Решение qrn-\-r = щ = const, г = п - т, будет устойчиво, если квадратичная форма
VrVs (1.3.14)
положительно-определенная, и неустойчиво, если при некоторых Vn-m эта форма принимает отрицательные значения. В случае же, когда координаты qi,...,qrn - квазициклические, вместо Vr в (1.3.14) следует ввести функцию У = П - Ti(/i, ix). Пусть в системах с циклическими и квазициклическими координатами величины q = hrr = = 1,... ,ш, одинаковы. Составим для таких решений форму ( 1.3.14) и аналогичную форму, содержагцую У, учитывая, что матрица коэффициентов аг7 в Ti{p,u) обратна матрице as. В результате получим, что разность между (1.3.14) и второй формой равна неотрицательной величине
т п-т т
ifrfs. где fr=YYl Sr -
r,s=l i=l s=l
Пз электромеханических систем теорема Рауса охватывает системы со сверхпроводяш,ими контурами. Будем игнорировать те исключительные случаи, когда обе указанные выше квадратичные формы обраш,аются в нуль при одних и тех же vi,... Vn-m- Тогда предыду-ш,ее означает, что формы равновесия под действием магнитного поля, устойчивые в случае, когда поле создается контурами с конечной проводимостью, будут устойчивы и при сверхпроводимости, но сугцествуют формы, устойчивые только в случае сверх-проводяш,их контуров. Системы со сверх-проводяш,ими контурами обладают, следовательно, качественными особенностями и
в рассматриваемом здесь laquo;чисто механическом raquo; смысле.
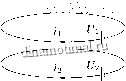
В качестве примера задачи о равно- р
весии электромеханической системы с замкнутыми токами рассмотрим равновесие в системе двух токовых колец. Предположим для простоты, что кольца одинаковы с обгцей вертикальной осью. Верхнее закреплено, нижнее должно свободно висеть в поле силы тяжести (рис. 1.1).
Для обеспечения силы магнитного притяжения между кольцами с ненулевым сопротивлением (случай сверхпроводяш,их колец будет
Глава 1. Описание электромеханических систем
рассмотрен ниже) в каждом из проводящих колец необходимо присутствие сторонних ЭДС. Следует ожидать, что при постоянных ЭДС в контурах равновесие будет неустойчиво. Устойчивость равновесия можно обеспечить двумя путями: либо введением в сторонние ЭДС переменных составляющих, либо обеспечив сверхпроводящее состояние колец [49].
Рассмотрим вначале случай постоянных ЭДС в контурах токовых колец Ui,U2 = const. Магнитная энергия системы двух колец может быть записана в форме
(1.3.15)
где L - собственная, а М() - взаимная индуктивность колец. Предполагается, что нижнее кольцо может совершать только поступательное перемещение у вдоль вертикальной оси (ось у направлена вниз). Коэффициент взаимной индукции является достаточно сложной функцией расстояния между кольцами
M{y)=fioR {-к)к{к)-Е{к) , (1.3.16)
к= . = lt; 1,
а функции
J \/l-ksm J
1 - k sin cpdcp
0 0
- полные эллиптические интегралы первого и второго рода. Функция М{у) - монотонно убывающая от величины L до О, чему соответствует уменьшение потокосцепления колец при увеличении расстояния между ними.
Составим уравнения Лагранжа-Максвелла описанной электромеханической системы:
Lii + M{y)i- + -2У + Rii = Ui, ду
my -
ду дМ .
iii2 = тд.
(1.3.17)
Найдем положение равновесия системы (1.3.17). Ему соответствуют стационарные значения токов
. U2
(1.3.18)
| 1 2 3 4 5 6 7 [ 8 ] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |




