 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Сигналы и спектры
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 [ 62 ] 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358
Следовательно, переданный сигнал s,(t) можно выразить через функцию \)/,(/) и коэффициенты а (г):
si (r)=a V/i(0 = V Vi(0. S2(t) = a2\\fl(t) = -[Ё\l(t).
(4.23,а) (4.23,6) (4.23,в)
Предположим, что был передан сигнал si{t). Тогда математические ожидания на выходах интеграторов произведений, изображенных на рис.4.7, б, при опорном сигнале \\fi(t) имеют следующий вид:
A/ \)/f(f) + (OVi(Orf
E{zi5i}=E
:л/ со5(0о?+л(0,
- COS (OqI dt
(4.24,a)
(4.24,6)
(4.25,a)
cos vUgt dt
(4.25,6)
Здесь E{-} обозначает среднее по ансамблю, так называемое математическое ожидание (expected value). В уравнении (4.25) Щn(t)] =0. На этапе принятия рещения, путем определения местоположения переданного сигнала в сигнальном пространстве, необходимо определить значение данного сигнала. В приведенном примере, где в качестве
базисной функции была взята\)/,(г) = .2/7 coscoo?, значения Е{г,(Г)} равны plusmn;4Ё.
Сигналы-прототипы {,(0} аналогичны опорным сигналам {Vfj{t)\, с точностью до нормирующего множителя. На этапе принятия решения выбирается сигнал с большим значением г,(7). Следовательно, в приведенном выше примере принятый сигнал определен как si{t). Вероятность ошибки при подобном когерентном детектировании сигналов BPSK рассмотрена в разделе 4.7.1.
4.4.2. Цифровой согласованный фильтр
В разделе 3.2.2 рассматривалась основная особенность согласованного фильтра - то, что его импульсная характеристика представляет собой запаздывающую версию зеркального отображения (поворота относительно оси г = 0) входного сигнала. Таким образом, если сигнал равен s{t), его зеркальное отображение имеет вид s{-t), а зеркальное отображение, запаздывающее на Т секунд, имеет вид s{T-t). Следовательно, импульсная характеристика h{t), соответствующая сигналу s{t), будет равна следующему:
(- . (4.26)
О для других t
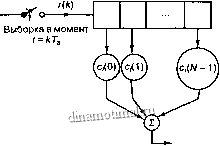
На рис. 4.7 и 4.8 представлена основная функция коррелятора - интегрирование произведения принятого зашумленного сигнала с каждым опорным сигналом и определение наилучшего соответствия. Схемы, показанные на этих рисунках, подразумевают использование аналоговой аппаратуры (умножителей и интеграторов) и непрерывных сигналов. На них не отражена возможность реализации коррелятора или согласованного фильтра с использованием цифровых технологий и дискретных сигналов. Пример подобной реализации приведен на рис. 4.10, где показан согласованный фильтр, используюший цифровую аппаратуру. Входной сигнал г(г) состоит из сигнала-прототипа s,(t) и шума n{t); ширина полосы сигнала И= 1/27 , где Т- длительность передачи символа. Таким образом, минимальная частота дискретизации по Найквисту равна / gt;= 2И= 1/7 , а время взятия выборки (7 ,) должно быть не больше времени передачи символа. Другими словами, на символ должно приходиться не менее одной выборки. В реальных системах подобная дискретизация производится с частотой, в 4 или более раз превышаюшей минимальную частоту Найквиста. Платой за это является не увеличение полосы передачи, а увеличение быстродействия процессора. В моменты t = kT, выборки (как показано на рис. 4.10, а) сдвигаются в регистре, так что более ранние из них располагаются правее. При дискретизации (взятии выборки) полученного сигнала непрерывное время t заменяется дискретным kTs или просто к, что дает право использовать дискретную запись:
r{k) = s,{k) + n{k) /=1,2 /t = 0, 1,... .
Здесь индекс / определяет символ из М-арного набора (в нашем случае - двоичного), й к - дискретное время. На рис. 4.10 согласованный фильтр аппроксимируется регистром сдвига с весовыми коэффициентами с,( laquo;), где п= О,N- 1 - временной индекс весовых коэффициентов и разрядов регистра. В приведенном примере число разрядов регистра и количество выборок на символ равны 4. Итак, суммирование, показанное на рисунке, происходит в моменты времени от и = О до и = 3. Из расположения сумматора на схеме понятно, что решение относительно значения принятого сигнала принимается после заполнения регистра 4 выборками. Отметим, что для простоты в примере на рис. 4.10, б выборки s,{k) могут принимать только три значения (О, plusmn;1). В реальных системах каждая выборка (и весовой коэффициент) - это 6-10 бит. Множеству весовых коэффициентов фильтра {с,(п)} соответствует импульсная характеристика фильтра; согласование весовых коэффициентов с выборками сигнала производится согласно дискретному варианту уравнения (4.26):
с,(п) = 5,[(/V - 1) - laquo;] = ,(3 - п). (4.27)
Использование дискретной формы интеграла свертки из уравнения (А.44,6) позволяет записать выражение с выхода коррелятора в момент времени, соответствуюший к-й выборке:
Z, (к) =г(к- п) с, (п) А: = О, 1, ..., по модулю N. (4.28)
п = 0
r(f)-
Si(f) = COSraof
-1 -
S2(f) = - COS raof
+1 -
-i-kno модулю 4
z(/c)= S r(/c-n)c, lt;n)
n = 0
J-1- no модулю 4
1 2 3 0 1
0 1 2 3 0 1
f = fcrs Весовые коэффициенты фильтра
согласовываются
с Si(/C)
si(3)=0 | si(2)=-1 | si(1) = 0 | si(0) = 1 |
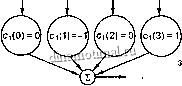
Содержимое регистра сдвига в момент к=3(шумом пренебрегаем)
zi = S si(3-n)ci(n) к=3 п=0
Zi(/C = 3) = 2
f = fcrs
Весовые
коэффициенты
фильтра
согласовываются
с s2{k)
si(3) = 0 | Si(2) = -1 | si(1) = 0 | si(0)=1 |
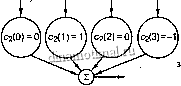
Z2 = S Si(3-n)C2(n) k=3 n=0
Z2(/C=3) = -2
Pmc. Цифровой согласованный филыпр: a) дискретный согласованный фильтр; б) пример детектирования с использованием дискретного согласованного фильтра (шумом пренебрегаем)
Здесь д- по модулю у - это остаток деления дг на у, индекс к соответствует времени принятия выборок и выхода фильтра, an- фиктивная переменная времени. В формуле (4.28) выражение г{к-п) содержит п, которое можно рассматривать как возраст выборки (как давно она находится в фильтре). В выражении с,(п) п удобно рассматривать как адрес весового коэффициента. Предполагается, что система синхронизирована и упорядочение символов во времени известно. Также предполагается, что шум имеет нулевое среднее, так что математическое ожидание принятой выборки равно следующему:
Щг{к)} = 5,{к) i=l,2.
л 4 к-г,




