 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Сигналы и спектры
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 [ 37 ] 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358
в нашем случае n(t) предполагается процессом AWGN с нулевым средним, а знак * обозначает операцию свертки. Для бинарной передачи по идеальному, свободному от искажений каналу, где свертка с функцией АДг) не ухудшает качество сигнала (поскольку для идеального случая hcit) - импульсная функция), вид rit) можно упростить:
КО = 5,(0+ 1(0 1=1,2,
0 lt;t lt;T.
(3.2)
Типичные функции демодуляции и детектирования цифроюго приемника показаны на рис. 3.1. Некоторые авторы используют термины демодуляция и детектирование как синонимы. В данной книге делается различие между ними. Демодуляцию (demodulation) мы определим как восстановление сигнала (в неискаженный видеоимпульс), а детектирование (detecnon) - как процесс принятия решения относительно цифрового значения этого сигнала. При отсутствии кодов коррекции ошибок на выход детектора поступают образы символов (или битов) сообшений т (также называемые жестким решением). При использовании кодов коррекции ошибок на выход детектора поступают образы канальных символов (или кодированных битов) и \, имеющие вид жесткого или мягкого решения (см. раздел 7.3.2). Для краткости термин детектирование иногда применяется для обозначения союкупности всех этапов обработки сигнала, выполняемых в приемнике, вплоть до этапа принятия решения. Блок преобразования с понижением частоты, показанный на рис. 3.1 в разделе демодуляции, отвечает за трансляцию полосовых сигналов, работаюших на определенных радиочастотах. Эта функция может реализовываться различными способами. Она может выполняться на входе приемника, в демодуляторе, распределяться между этими двумя устройствами или вообще не реализовываться.
Этап 1
преобразование сигнала в выборку
Этап 2 принятие
Додетекторная Р точка
AWGN
Демодуляция и дискретизация
Выборка в момент! t=T

1 рНбнижёнйё частоты
Для полосовых сигналов
Принимающий фильтр
Выравнивающий фильтр
z(t)
Компенсация ISI,
введенной
каналом
z(T)
Принятый сигнал, r(t) = s/(0*MO +n(t)
Видеоимпульс
(возможно,
искаженный)
Видеоимпульс, z(0 = а, lt;0 + ло(0
Выборка (тестовая статистика), z(T) = а, lt;Г) + ло(Т)
Детектирование | ||
Сравнение | ||
с порогом | ||
т, или
Символ сообщения, т, или канальный символ, й,
Е23 Необязательный элемент СП Необходимый элемент
Рис. 3.1. Два основных этапа в процессе демодуляции/детектирования цифровых сигналов
В блоке демодуляции и дискретизации (рис. 3.1) изображен принимающий фильтр (по сути, демодулятор), выполняющий восстановление сигнала в качестве подготовки к следующему необходимому этапу - детектированию. Фильтрация в передатчике и канале обычно приюдит к искажению принятой последовательности импульсов, вызванному межсимвольной интерференцией, а значит, эти импульсы не совсем готовы к дискрети-
зации и детектированию. Задачей принимающего фильтра является восстановление низкочастотного импульса с максимально возможным отношением сигнал/шум и без межсимвольной интерференции. Оптимальный принимающий фильтр, выполняющий такую задачу, называется согласованным (matched) фильтром, или коррелятором (correlator) и описывается в разделах 3.2.2 и 3.2.3. За принимающим фильтром может находиться выравнивающий фильтр (equalizing filter), или эквалайзер (equalizer); он необходим только в тех системах, в которых сигнал может искажаться вследствие межсимвольной интерференции, введенной каналом. Принимающий и выравнивающий фильтры показаны как два отдельных блока, что подчеркивает различие их функций. Впрочем, в большинстве случаев при использовании эквалайзера для выполнения обеих функций (а следовательно, и для компенсации искажения, внесенного передатчиком и каналом) может разрабатываться единый фильтр. Такой составной фильтр иногда называется просто выравнивающим или принимающим и выравнивающим.
На рис. 3.1 вьщелены два этапа процесса демодуляции/детектирования. Этап 1, преобразование сигнала в выборку, выполняется демодулятором и следующим за ним устройством дискретизации. В конце каждого интервала передачи символа Т на выход устройства дискретизации, додетекторную точку, поступает выборка z(7), иногда называемая тестовой статистикой. Значение напряжения выборки z(7) прямо пропорционально энергии принятого симюла и энергии шума. На этапе 2 принимается решение относительно цифроюго значения выборки (выполняется детектирование). Предполагается, что шум является случайным гауссовым процессом, а принимающий фильтр демодулятора - линейным. Линейная операция со случайным гауссовым процессом дает другой случайный гауссов процесс [2]. Следовательно, на выходе фильтра шум также является гауссовым. Значит, выход этапа 1 можно описать выражением
z(J) = a,{T) + no(T) 1 = 1,2, (3.3)
где а,{Т) - желаемый компонент сигнала, а ио(7) - шум. Для упрощения записи выражение (3.3) будем иногда представлять в виде z- а,+ щ. Шумовой компонент ио - это случайная гауссова переменная с нулевым средним, поэтому z(7) - случайная гауссова переменная со средним ах или aj, в зависимости от того, передавался двоичный нуль или двоичная единица. Как описывалось в разделе 1.5.5, плотность вероятности случайного гауссового шума ио можно выразить как
/( laquo;ь)=-
эл/2
(3.4)
где с5о - дисперсия шума. Используя выражения (3.3) и (3.4), можно выразить плотности условных вероятностей p(zsi) и p(zs2)-
р(ф,)=-ехр
(3.5)
P(Z\S2) =
,л/2я
z-a-.
(3.6)
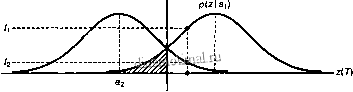
Эти плотности условных вероятностей показаны на рис. 3.2. Плотность рСфО, изображенная справа, называется правдоподобием s, и показывает плотность вероятности случайной переменной z(T) при условии передачи символа Подобным образом функция p(z\s2) (слева) является правдоподобием sj и показывает плотность вероятности z(7) при условии передачи символа sj. Ось абсцисс, z(7), представляет полный диапазон возможных значений выборки, юятой в течение этапа 1, изображенного на рис. 3.1.
Правдоподобие S2, Правдоподобие s
PUlS2)
га(Л а,
Рис. 3.2. Плотности условных вероятностей: p(z\si) и pizlsi)
После того как принятый сигнал преобразован в выборку, действительная форма сигнала уже не имеет значения; сигналы всех типов, преобразованные в одинаковое значение z(7), идентичны для схемы детектирования. Далее будет показано, что оптимальный принимающий фильтр (согласованный фильтр) на этапе 1 (рис. 3.1) отображает все сигналы с равными энергиями в одну и ту же точку z(T). Следовательно, важным параметром процесса детектирования является энергия (а не форма) принятого сигнала, именно поэтому анализ детектирования для видеосигналов не отличается от анализа для полосовых сигналов. Поскольку z(7) является сигналом напряжения, пропорциональным энергии принятого симюла, то чем больше амплитуда z(7), тем более достоверным будет процесс принятия решения относительно цифрового значения сигнала. На этапе 2 детектирование выполняется посредством выбора гипотезы, являющейся следствием порогоюго измерения
(3.7)
где Hi п Н2 - две возможные (бинарные) гипотезы. Приведенная запись указывает, что гипотеза Я, выбирается при z(T) gt; у, а Н2 - при z(7) lt; у. Если z(T) = у, решение может быть любым. Выбор Н равносилен тому, что передан был сигнал si(/), а значит, результатом детектирования является двоичная единица. Подобным образом выбор Яг равносилен передаче сигнала S2(0 gt; а значит, результатом детектирования является двоичный нуль.
3.1.3. Векторное представление сигналов и шума
Рассмотрим геометрическое или векторное представление, приемлемое как для низкочастотных, так и полосовых сигналов. Определим N-мерное ортогональное пространство как пространство, определяемое набором N линейно независимых функций {ф/О}, именуемых базисными. Любая функция этого пространства может выражаться через линейную комбинацию этих базисных функций, которые должны удовлетворять условию




