 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Радионавигационные системы, спутниковая радионавигация
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 [ 49 ] 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
Канал первого типа (диапазоны 390...1550 МГц и 3...300 ГГц) может удовлетворить авиационных потребителей, которые широко пользуются УКВ связью с землей. Связь с ретрансляцией через спутники, особеннр стационарные, сможет обеспечить КИ любого потребителя на обишрных территориях, однако соответствующая оконечная аппаратура и антенна спутника будут достаточно дороги, вследствие чего такой способ считают приемлемым для обеспечения океанских акваторий, когда другие способы явно неприменимы. По каналам средневолнбвой связи (275...2000 кГц) можно обслужить наземных и морских потребителей на дальностях до нескольких сотен километров, при этом с несуи;ественными доработками можно использовать эксплуатируемые в данном диапазоне сети наземных радиомаяков. Вариант с применением диапазона навигационного сигнала laquo;Навстар raquo;, когда КИ излучается передатчиком псевдоспутника, а на борту потребителя один из каналов отводится для ее приема, представляется достаточно предпочтительным.
По-видимому, речь не идет о выборе для всех потребителей единых каналов связи: ДМ может опираться на различные радиоканалы, и различные группы потребителей будут пользоваться предназначенными им каналами в зависимости от зоны их действия и оснащенности оконечными связными устройствами.
Наиболее успешно ведутся проработки по обеспечению КИ потребителей в прибрежных водах (они стимулируются Береговой охраной США и аналогичными ведомствами скандинавских стран), а также в приаэродромных зонах.
В качестве передающих станций для сообщения КИ потребителям в прибрежных морских водах планируется использовать уже существующие радиомаяки. Желательно, чтобы по мере движения корабля относительно береговой зоны КИ принималась последовательно через различные радиомаяки, причем переключение со станции на станцию выполнялось бы автоматически. Естественно, что при этом потребитель должен иметь возможность выбирать наивыгоднейшей для него радиомаяк.
Комитет SC-104 рекомендует для этого информационный кадр особого содержания - седьмого типа. Данный кадр содержит информацию о местоположении и состоянии всех радиомаяков, связанных с данной ККС.
Есчи при реализации ДР потребитель опирается на псевдоспутники, ему необходима информация о их местоположении, коде и о состоянии аппаратуры. Эти сведения содержатся в кадре восьмого типа.
При подборе каналов передачи КИ исходят из объема передаваемой информации и частости повторения передачи, что определяет необходимую скорость передачи. Рассмотренные рекомендации по форматам кадра КИ, включающие набор кадров 298
различной длительности, позволяют сократить до минимума I объем КИ, сообщаемый потребителям в данной зоне в сложив-I шихся условиях. Так, основной кадр первого типа желательно передавать как можно чаще, в то время как кадр второго типа можно сообщать один раз в минуту, третьего и пятого типов - поочередно через 1 мин, седьмого типа - один раз в 5 мин. На объем передаваемой информации в 1ияет также число S спутников, за которыми ведется слежение.
Если принять скорость передачи информации 50 бит/с, можно ;оценить среднее время передачи кадра первого типа и дополнительно кадра девятого типа: для среднего числа отслежи-1 ваемых НИСЗ, составляющего обычно 7, кадр первого типа может быть передан за 10 с, а скоростной кадр девятого типа в случае повторных сообщений с НИСЗ-за 7 с.
Частота повторения передачи КИ определяется скоростью нарастания остаточной погрешности и требованиями потребителя к точности местоопределения. Для неподвижного потребителя остаточная погрешность будет возрастать со временем в 1 связи с ростом нескомпенсированного ухода ШВ спутника и изменением проекции эфемеридной погрешности на направление радиолинии из-за движения НИСЗ. Для подвижного потреби-I теля влияние второго фактора будет усиливаться вследствие I собственного движения потребителя. Чем выше требования к навигационной точности, тем чаще следует обновлять КИ. . Считается [177], что для высокоточных определений повторять передачу КИ следует через 10...30 с, в более облегченных ситуациях - через 5... 10 мин.
Более обоснованные данные можно получить в результате обстоятельных исследований пространственной и временной корреляции погрешностей в зоне действия ККС.
20.6. ТОЧНОСТНЫЕ ХАРАКТЕРИСТИКИ ДМ
Источники погрешностей НВО в ДР. На точность НВО с помощью сетевых СРНС влияют многочисленные факторы. В литературе приводится много оценок составляющих погрешности местоопределения, полученных математическим моделированием и обобщением опыта эксплуатации АП, которые не всегда согласуются между собой из-за различия в исходных данных. Тем не менее возможно представить их применительно к системе laquo;Навстар raquo; (табл. 20.3) в виде, наглядно демонстрируюгцем выигрыш от применения дифференциальной обработки (подсистема DGPS) в варианте использования АП, работающей по колам Р и С/А.
Остаточная погрешность. Из табл. 20.3 видно, что в зоне н;и6().ьшей эффективности ДР систематические составляющие lioi )1 чнности (эфемеридная, ШВ, ионосферная, избирательного
Таблица 20.3
Составляющие погрешности местоопределения
Источники и виды погрешностей
DGPS | .GPS | DGPS | ||
Неточность прогноза эфемерид и ухода | ||||
Возмущения орбиты и немоделируемые | ||||
уходы ШВ | ||||
Задержка сигнала в ионосфере | ||||
Задержка сигнала в тропосфере | ||||
Шумы приемника | ||||
Многолучевость распространения | ||||
Ограничения, вводимые мерами избира- | 30,0 | |||
тельного доступа для гражданских потре- | ||||
бителей | ||||
Прочие источники | ||||
Эквивалентная СКП измерения дальности: | ||||
без фильтрации | 32,2 | |||
с фильтрацией | 31,7 | |||
СКП определения места: | ||||
без фильтрации | ||||
с фильтрацией | ||||
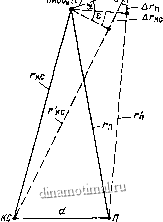
Рис. 20.6. Диаграмма, поясняющая зависимость остаточной погрешности измерений от 1 удаления потребителя от ККС
HHC3 (t+At)
Значения, м. при использовании кода
Примечание, ГФ принят равным 3.
доступа) исключаются, в то время как случайные составляющие определяют уровень остаточной (после дифференциальной коррекции) погрещности. Именно последняя в ДР определяет эквивалентную погрешность измерения дальности, которая далее через геометрический фактор пересчитывается в погрешность определения координат потребителя. Отметим, что фильтрация случайных погрешностей способна снизить их влияние примерно втрое. Приведенные оценки показывают, что применение фильтрации заметно улучшает точностные характеристики ДР по сравнению со стандартным: для работы с кодом Р погрешность с 14 м снижается до 4 м, а для кода С/А имеет место еще более разительный эффект уменьшения погрешности - с 95 до 6 м. Последняя оценка демонстрирует особую эффективность ДР в условиях нештатного функционирования системы, когда резко возрастают.сильнокоррелированные погрешности.
Приведенные оценки относятся к случаям благоприятной геометрии, когда ГФ не более 3. Если же окажется, что в сеансе не участвуют НИСЗ с высокими углами места, то погрешность определения высотной координаты потребителя мо-
жет возрасти вдвое. В такой ситуации использование ДР с применением псевдоспутников в качестве ККС может ее снизить.
По мере отработки систем laquo;Глонасс raquo; и laquo;Навстар raquo; точность прогнозирования эфемерид и временных поправок будет возрастать, что приведет к повышению относительного вклада погрешностей из-за распространения радиоволн и шумовых погрешностей АП. Следует при этом иметь в виду, что погрешности из-за смещения ШВ при ДР могут быть полностью скомпенсированы. Компенсация эфемеридных, тропосферных и ионосферных погрешностей ухудшается с разнесением трасс распространения сигналов от НИСЗ соответственно к ККС и к потребителю. Происходит как бы геометрическая декорре-ляция эфемеридных погрешностей и пространственная декорре-ляция ионосферной погрешности.
Вопросы пространственно-временной корреляции погрешностей измерения псевдодальностей и снижения шумовой погрешности измерений являются предметом усиленных теоретических и экспериментальных исследований.
Остаточная эфемеридная погрешность и ее зависимость от расстояния между потребителем и ККС. Если в точке размещения ККС можно полностью скомпенсировать сильнокоррелированные погрешности измерений, то с удалением потребителя от ККС появляется нескомпенсированная (остаточная) погрешность, которая будет возрастать с увеличением расстояния между ККС и потребителем. Этот эффект можно наглядно проследить с помощью упрощенной диаграммы [158] влияния неточностей прогноза эфемерид и ухода БШВ (рис. 20.6).
Если бы эфемериды и ШВ были безошибочными, то при расположении спутника в некоторой истинной точке НИСЗ в момент t расчетное его положение НИСЗр в тот же момент совпало бы с истинным. В действительности же при наличии эфемеридной fi и временной погрешностей расчет на ККС н у потребителя момента и места излучения сигнала дает смещенную точку НИСЗр и искаженный момент (t + M) излучения сигнала. Поэтому при обработке данных о псевдодальности появятся соответствующие погрешности, причем временные погрешности Ы для ККС и потребителя будут одинаковыми, а эфемеридные погрешности окажутся различными, так как проекция отрезка НИСЗ -НИСЗр (длиной fi) на направления радио-
трасс НИСЗр-ККС (Az-kc ) НИСЗр-потребитель (Аг ) будут неодинаковыми. С удалением потребителя от ККС, т. е. с ростом d, это различие в общем случае будет увеличиваться.
Для ККС в этом случае расчетное значение момента прихода сигнала
а истинное значение
так что погрещность в измерении задержки сигнала
АТкс laquo; А-кс/с + Аг. (20.6)
Для потребителя погрешность в измерении задержки сигнала будет иной:
ДГп Arjc + М. (20.7)
Соответствующие (20.6) и (20.7) погрешности при обработке данных о псевдодальности
Из (20.8) видно, что, во-первых погрешность из-за ухода спутниковой ШВ не зависит от расстояния d и будет полностью компенсироваться и, во-вторых, что остаточная погрешность определится разностью Д/- = Д/-,(- - ;
5статочную погрешность можно выразить через fi, d и г, если учесть, что Ar = fisina, а ДГ.=б51П (а -е). Тогда, имея в виду, что е-малая величина (ed/r), получаем ДГост = б cos ае, откуда следует
АГо1т lt; (fid -)cosa.
(20.9)
Отметим, что остаточная погрешность, обусловленная неточностью прогноза эфемерид, существенно уменьшается, если эфемеридная погрешность направлена по радиолинии (а = 90 deg;). К ошибкам же вдоль орбиты система в ДР наиболее чувствительна. В противоположность этому стандартная система весьма чувствительна к погрешностям и.менно вдоль радиолинии и малочувствительна к погрешностям вдоль орбиты.
В наихудшем случае (а = 0), когда вектор эфемеридной погрешности направлен вдоль орбиты, верхняя граница оценки
ArocT lt;Sd/r. (20.10)
По соотношению (20.10) нетрудно подсчитать, что при эфемеридной погрешности S=l км остаточная погрешность для удалений 100 и 500 км будет составлять соответственно 5 и 25 м, а при 6=100 м остаточная погрешность на тех же удалениях составит 0,5 и 2,5 м.
Видно, что остаточная погрешность растет линейно с удалением потребителя от ККС*. Следует при этом иметь в виду, что погрешности в измерении псевдодальности пересчитываются в погрешности определения координат через геометрический фактор. Последний обычно удерживается на уровне до 3. Поэтому в соответствии с (20.10) при 6=100 м на удалении d = 500 км остаточная погрешность определения координат может достигать 7,5 м.
*Недавно предложена методика, исключающая такой рост.
Снижение эфемеридных погрешностей будет уменьшать остаточную погрешность, причем ограничением здесь является шумовая погрешность измерений, которая не должна маскировать выигрыш от применения ДМ.
Остаточная ионосферная и тропосферная погрешности. В стандартном режиме при работе по коду Р ионосферная погрешность устраняется путем использования двухчастотного приема, а при работе по коду С/А - внесением поправок, рассчитываемых потребителем по некоторой модели ионосферы, задаваемой набором коэффициентов. Если в ДР использовать алгоритм коррекции с применением модели ионосферы, надо, чтобы модель одинаково точно описывала состояние ионосферы и для ККС, и для потребителя. На это нельзя рассчитывать, так как местные возмущения у потребителя не поддаются прогнозу с ККС, вследствие чего реальные условия прохождения радиоволн к ККС и к потребителю будут по-разному отличаться от модельных и компенсация не будет полной. Поэтому в ДР рекомендуется не проводить особую алгоритмическую компенсацию ионосферных погрешностей, а устранять их заодно с другими при внесении дифференциальных поправок. Если на ККС вводится поправка и КИ будет содержать лишь ее нескомпенсированную часть, причем потребитель сам не может рассчитать поправку, то данные о ней должны отдельно сообщаться потребителю для ввода им такой же коррекции. Если же потребитель получит возможность пользоваться точной ионосферной моделью, то алгоритмическую коррекцию можно возложить на него самого. Тогда ионосферная поправка, вводимая на ККС, не будет содержаться в сообщаемой потребителю КИ. В случае ее неучета на ККС надо будет сообщать значение погрешности потребителю.
В ДР, когда КИ включает и ионосферную погрешность, а потребитель не проводит собственной коррекции ионосферной погрешности, остаточная погрешность у потребителя будет включать составляющую ионосферного происхождения. Последняя вызывается двумя факторами: различием углов возвышения НИСЗ относительно ККС и потребителя, что приводит к различной протяженности путей радиосигнала в ионизированной среде; наличием нерегулярных из.менений в вертикальном распределении плотности ионизации, что создает различные условия на радиотрассах к ККС и к потребителю. По имеющимся оценкам, первый фактор дает вклад порядка 1 ,м, второй - около 0,5 м.
Тропосфера при угле возвышения НИСЗ менее 5 deg; может внести в измерения псевдодальности погрешность до 30 м. Однако существуют модели тропосферы, способные учитывать такие погрешности с точностью до 1...3 м. При использовании ДР остаточная погрешность за счет тропосферы составит десятые доли метра. Имеет место и другая причина тропосферной остаточной погрешности - разность высот ККС и потребителя, проявляющаяся
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 [ 49 ] 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |




