 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Радионавигационные системы, спутниковая радионавигация
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 [ 44 ] 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
18.3. ГЕОМЕТРИЧЕСКИЕ ФАКТОРЫ ПРИ ОПРЕДЕЛЕНИИ ПОВЕРХНОСТНЫХ КООРДИНАТ ПО ЭЛЕМЕНТАРНОМУ СОЗВЕЗДИЮ ИЗ ТРЕХ НИСЗ
На практике точное пассивное измерение дальностей по НИСЗ, как правило, невозможно из-за расхождения шкал времени системы НИСЗ и П. Рассмотрим разностно-дальномерный метод определения поверхностных координат по элементарному созвездию из трех НИСЗ.
При измерении разностей расстояний Ari2 и Агз2 до НИСЗ Ci, С2, Сз и известном расстоянии рп до центра Земли вектор положения П Рп определяется из соотношений (рис. 18.1)
АГ12= рп-Pel I - рп - Pc2l ; АГ32= рп-рсз1 - п-Pc2l ; Рп= п.
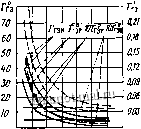
Рассуждая, как в sect; 18.2, можно получить выражения для ГФ, характеризующих влияние погрешностей измерения разностей дальностей, знания расстояния до центра Земли и ошибок эфемерид на точность определения места. Из рис. 18.5 видно, что точность разностно-дальномерной системы из трех НИСЗ, расположенных на одной орбите, улучшается по мере удаления от орбитальной плоскости и возрастает с увеличением угла разноса НИСЗ вдоль орбиты. Влияние погрешностей положений НИСЗ на точность определения места уменьшается с ростом коэффициента корреляции ошибок эфемерид. При независимых эфемеридных ошибках наибольшее влияние на точность оказывают погрешности НИСЗ по высоте, при систематических ошибках для объектов, расположенных на широтах свыше 8 deg;,- погрешности вдоль орбиты. Для экономии места здесь, в отличие от sect; 18.2, не приводятся контуры равных ГФ для рассматриваемого элементарного созвездия. Выводы, которые можно сделать на основании анализа поведения ГФ в зоне действия системы из трех НИСЗ, в основном те же, что для системы из двух НИСЗ: 1) если составляющие погрешностей эфемерид одного порядка, то при оценке точности
ДэР Ггэп Гin | ||||||
J5 J0 15
15 10 5
О 10 20 30 ио 50 60 (р deg; О 10 20 30 U0 50 60 (f deg;
10 20 30 ио 50 60 If
Рис. 18.5. Изменение ГФ вдоль главного направления в разностно-дальномерной системе из трех НИСЗ, разнесенных на 30 deg; (----) и на
45 deg; (-).
определения поверхностных координат практически достаточно учитывать лишь радиальную составляющую эфемеридной погрешности, 2) если пренебрежение продольной и нормальной составляющими погрешностей эфемерид справедливо, а высота П известна достаточно точно, то при оценке точностных свойств созвездия трех НИСЗ по отношению к случайным погрешностям достаточно пользоваться только ГФ Г? . Дисперсию погрешности измерения при этом необходимо суммировать с удвоенной дисперсией радиальной составляющей.
Геометрические факторы в зоне действия рассматриваемого элементарного созвездия изменяются в следующих пределах:
3,1 lt;Г; lt;12,8; 0,6 lt;Г?р lt;5,5; 4,5 lt;Г?зр lt; 18,5; 0,15 lt;Г lt;1,2; 0,5 lt;rL lt;0,6; 0,004 lt;г;зр lt; 0,1; 0,07 lt; fL lt; 0,15; 0,010 lt; fL lt; 0,025.
Знание диапазонов изменений ГФ системы в зоне ее действия позволяет поставить и решить задачу о рациональном выборе ограничений, накладываемых на составляющие погрешности СРНС. Под рациональным выбором будем понимать такое соотношение между погрешностями, которое обеспечивает примерно равный вклад каждой из них в погрешность определения места. Это приводит к следующему соотношению:
F? (Тд. = F?p (Тр = Г deg;зр Ор = F deg;3 Оп = F? (т .
(18.2)
Здесь а?- дисперсии г-й составляющей погрешности навигационных определений. Смысловое значение индексов понятно, если сравнить их с индексами соответствующих ГФ в выражении (18.2).
При проектировании системы равенство (18.2) позволяет установить верхние допустимые границы составляющих погрешностей следующим образом. Определим сначала ту составляющую, затраты на уменьшение которой наибольшие. Пусть, например, это (Тд, . Тогда границы остальных составляющих найдутся из соотношений типа (Трсгдл F? /F?p... Если практически достижимое значение некоторой составляющей погрешности лежит значительно ниже этой границы, то такую составляющую :у10жно при оценке точности не учитывать.
Применительно к рассматриваемому случаю, как видно из указанных пределов изменений ГФ, достаточно для практики учитывать лишь первые три слагаемых.
В заключение отметим, что с увеличением высоты орбиты погрешность определения места, вызванная погрешностями измерения разностей дальностей, увеличивается.
18.4. ГЕОМЕТРИЧЕСКИЕ ФАКТОРЫ ПРИ ОПРЕДЕЛЕНИИ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПО ЭЛЕМЕНТАРНОМУ СОЗВЕЗДИЮ ИЗ ЧЕТЫРЕХ НИСЗ
При определении пространственных координат по измерениям квазидальностей или разностей дальностей элементарное созвездие должно содержать четыре НИСЗ. Точностные характеристики местоопределения, как нетрудно показать, в том и в другом случае совпадают.
Корреляционная матрица ошибок навигационных определений (см. в гл. 16) с учетом случайных и систематических погрешностей измерений и знания положения НИСЗ может быть представлена в виде четырех слагаемых:
к,=(ск -ос)~+[сЧСрКэос;)~с] +[ cKic к с)~с] +
+ [сЧСрК:сКзсС) с] , ,(18.3)
где Кио и Кэо - корреляционные матрицы случайных погрешностей измерений и знания положений НИСЗ; К с и К,с- корреляционные матрицы систематических погрешностей измерений и положений НИСЗ; Ср - матрица преобразования координат из орбитальной системы координат в измерительную; С - матрица наблюдений.
Выражение (18.3) показывает, что на точность навигационных определений по-разному влияют систематические и случайные погрешности измерений, систематические и случайные погрешности положения НИСЗ по высоте, вдоль и перпендикулярно плоскости орбиты. Это влияние может быть- охарактеризовано ГФ, приведенными в sect; 18.2, как это принято [ПО] делать при анализе точности наземных РНС. Эта аналогия прослеживается в sect; 18.2 и 18.3. Однако в рассматриваемом случае подобные характеристики оказываются уже недостаточными, элементарная ячейка из четырех НИСЗ позволяет определить не только поверхностные, но и пространственные координаты и время. Поэтому понятие ГФ требует расширения; для П могут представлять интерес погрешности навигационных определений в плане (в горизонтальной плоскоегн), по вертикали, погрешности в трехмерном пространстве и при определении поправки к шкале времени. Для задач проектирования систем небезынтересна и суммарная погрешность определений в пространстве и во времени. Эти погрешности могут характеризоваться ГФ Гг, Гв, Г определения координат соответственно в горизонтальной, вертикальной плоскостях и в пространстве, Г( определения поправки к шкале времени и суммарным ГФ Tj . Кроме того, следует говорить, например, о группе ГФ, характеризующих влияние различных источников погрешностей на точность определения места в горизонтальной плоскости или в трехмерном пространстве. Чтобы различить влияние систематических
270
И случайных ошибок, будем применять обозначения Г и Г?и соответственно. Если корреляционная матрица погрешностей единичная, то нетрудно видеть, что Г =Sp(K lt;7). Кроме того,
r=rs-fr?, r2=r2-fH.
в топоцентрической системе координат величина Г?-сумма двух первых диагональных членов, Гв - 3-й диагональный член, а Г?-4-й диагональный член корреляционной матрицы К lt;/, полученной в предположении, что матрица Kr единичная, т. е., например, Г? =5р(Ак(СТ gt;)-А] lt;).
Анализ точностных свойств системы из четырех НИСЗ при определении пространственных координат сводится, таким образом, к исследованию поведения пяти групп ГФ, в каждой из которых содержится 9 коэффициентов. Подобный анализ позволяет выяснить, как меняется точность в зависимости от различных геометрических расположений НИСЗ и П и каковы пределы этих изменений. Результаты решения этой задачи рассмотрены в гл. 25, посвященной синтезу систем по точностным критериям, поскольку именно элементарное созвездие из четырех НИСЗ служит основным рабочим звеном в современных ССРНС.
18.5. ТОЧНОСТНЫЕ СВОЙСТВА ДОПЛЕРОВСКИХ МЕТОДОВ В СЕТЕВЫХ СРНС В СРАВНЕНИИ С ДАЛЬНОМЕРНЫМИ
Уже отмечалось, что для определения координат с помощью ССРНС доплеровский метод [117] не применяется вследствие низкой ТОЧНОСТИ при высоких орбитах НИСЗ. По-видимому, высокие орбиты НИСЗ следует признать неотъемлемым свойством сетевых систем, так как это позволяет обойтись значительно меньшим числом НИСЗ (см. гл. 19). Рассмотрим поэтому, как меняется точность навигационных определений различными методами при изменении высоты орбит НИСЗ.
Методы целесообразно сравнивать по критерию точности определения поверхностей положения. Смещение поверхности положения, вызываемое погрешностью измерения НП, определяется градиентом поверхности положения. Мерой точности метода навигационных определений может служить величина, обратно пропорциональная модулю градиента поверхности положения (2.14). Чем больше градиент, тем точнее может быть определено положение П в направлении градиента. В sect; 2.3 было показано, что для дальномерного метода \gradRr\ = l, а для доплеровского Igrad/?,: I =в, где в - угловая скорость перемещения НИСЗ относительно П.
Приведенные выражения показывают, что точность опреде-ния поверхности положения при дальномерном методе не зависит от взаимного положения П и НИСЗ, а при доплеровском зависит. Для сравнения методов примем такое расположение П и НИСЗ,
2000 1000 500
200 100
20 10
6r,m
150 120 90 50
2 3
10 Л/i-io U raquo;
JO 50 100 200300 ,
00 mo
Рис. 18.6. Соотношение градиентов доплеровских и дальномерных поверхностей положения при различных высотах круговых экваториальных орбит НИСЗ
Рис. 18.7. Зависимость точности определения координат от ширины спектра сигнала при измерении только дальности или дальности и радиальной скорости
при котором доплеровский метод наиболее точен. Для этого случая ход кривой, устанавливающей соотношение точностей доплеровского и дальномерного методов навигационных определений по отношению к поверхностям положения при различных высотах круговых экваториальных орбит НИСЗ, показан на рис. 18.6. Видно, что с ростом высоты орбиты точностные характеристики доплеровского метода резко ухудшаются по сравнению с дальномерным, особенно на высотах свыше 10 ООО км. При стационарных орбитах НИСЗ определение координат неподвижного П доплеров-ским методом невозможно. Вопрос о том, до каких высот орбиты НИСЗ целесообразно использовать доплеровский метод, требует исследования достижимого соотношения погрешностей измерения Or и О/. Это соотношение зависит от ширины спектра используемого сигнала, уровня технологии, диапазона частот и стабильности генераторов НИСЗ и П. Результаты экспериментальных исследований точности дальномерного и дальномерно-доплеровского методов определений по НИСЗ Timation-I и Timation-II (рис. 18.7) с высотами орбит ~900 км показывают, что при ширине спектра свыше 300 кГц дальномерный метод становится точнее доплеровского. При увеличении высоты орбиты эти недостатки доплеровского метода делают его неприемлемым для определения координат места. По этим причинам в сетевых СРНС применяют только дальномерный метод.
ГЛАВА 19
ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ И ВЕКТОРА СКОРОСТИ ПО СЕТИ НИСЗ
19.1. ОБЩАЯ ХАРАКТЕРИСТИКА ПОЛЯ ТОЧНОСТЕЙ
Приведенные в гл. 16 выражения позволяют оценить точностные характеристики любой ССРНС, если известна корреляционная матрица погрешностей . Если каждой точке 3-мерного пространства поставить в соответствие точность навигационных определений, получаемую в этой точке по исследуемой сети НИСЗ, то в пространстве образуется так называемое поле точностей данной СРНС. Нахождение простой математической аппроксимации поля точностей весьма актуально. Сложность решения этой задачи для ССРНС усугубляется тем, что поле точностей меняется во времени (исключение составляют лишь системы, опирающиеся на сеть стационарных НИСЗ) из-за движения спутников относительно земной поверхности.
Рассмотрим некоторые общие закономерности, присущие полю точностей СРНС. В такой системе в различных точках ее зоны действия потребитель может наблюдать различное число НИСЗ, превышающее минимальное, необходимое ему для навигационных определений. Проводя навигационное определение по всем НИСЗ, находящимся в зоне его радиовидимости при наличии случайных погрешностей, П будет получать наивысшую возможную точность. Естественно предполагать, что чем больше число НИСЗ доступно для П, тем выше будет точность навигационных определений. Расчеты показывают (см. sect; 19.3), что это предположение справедливо не всегда и что существенную роль играет не только число видимых НИСЗ, но и конфигурация наблюдаемого их созвездия. Тем не менее зоны повышенной и пониженной точности совпадают с зонами наибольшего сгущения и наибольшего разрежения НИСЗ. Особое положение занимают точки, где возможно компланарное расположение наблюдаемого созвездия НИСЗ и П, приводящее к наибольшей потере точности.
Каждый НИСЗ сетевой системы обслуживает в данный момент времени ограниченную область, определяемую зоной его радиовидимости. На границе этой области меняется состав видимого созвездия НИСЗ, следовательно, скачком изменяется и точность навигационных определений. Таким образом, поле точностей сетевых СРНС состоит из ряда областей, на границах которых имеются разрывы 2-го рода. Внутри каждой области поле точностей меняется плавно, за исключением, может быть, описанных ранее точек, где возможны разрывы 1-го рода из-за компланарности созвездия НИСЗ и П. Границы областей постоянно смещаются вследствие движения НИСЗ, при этом изменяются и конфигурации
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 [ 44 ] 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |




