 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 [ 67 ] 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
тивления. Напомним в связи с этим, что для определения параметров усилителя как звена системы автоматического регулирования прежде всего требуется знать его коэффициент усиления по напряжению для относительно малых сигналов.
Обращаясь к схеме, изображенной на рис. 118, а, нетрудно видеть, что интересующее нас напряжение определяется
разностью потенциалов точек а и Ь. Потенциал точки b (средняя точка вторичной обмотки питающего трансформатора) остается неизменным. Потенциал же точки а изменяется с изменением входного сигнала. При сделанных допущениях
:0, /,./,
и потенциал точки а легко может быть найден как потенциал точки соединения двух нелинейных чисто реактивных сопротивлений, включенных последовательно. Этими сопротивлениями являются, очевидно, две пары дросселей, входящих в схему.
На рис. 121 схематично изображены два одинаковых семейства вольт-амперных характеристик, найденные способом, ука-
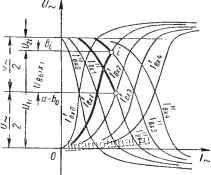
Рис. 121. Построение статической характеристики магнитного усилителя напряжения
занным В П. 8 настоящей главы. При отсутствии входного сигнала подмагничивание создается только током смещения, одинаковым для верхней и нижней пары дросселей, потому их индуктивное сопротивление одинаково и потенциал точки b определяется ординатой feo и в точности равен потенциалу точки а\ выходное напряжение при этом равно нулю.
Допустим, что эквивалентная величина подмагничивающего тока смещения
1см ~ tex, - lex,-
Если при этом на вход подается сигнал и, появление которого сопровождается уменьщением эквивалентной величины подмагничивающего тока одной пары дросселей до значения
= lex. -
И увеличением подмагничивающего тока другой пары до значения
Uex,
Wex Щм
то семейства вольт-амперных характеристик будут уже пересекаться в точке i. Это соответствует увеличению падения напряжения на первой паре дросселей и уменьшению - на второй. Потенциал точки b при этом равен Ь а величина выходного напряжения определится длиной отрезка аЬ,.
Ueux = abi.
При изменении полярности входного сигнала изменится и направление отрезка а6 что означает опрокидывание фазы
выходного напряжения.
Этот же прием пригоден и для построения статической характеристики мостовой схемы (см. рис. И9). Необходимо лишь помнить, что коэффициент усиления мостовой схемы будет вдвое выше коэффициента усиления дифференциальной схемы (см. рис. П8), так как потенциал точки а в мостовой схеме не будет постоянным, а будет откло-
пяться в сторону от значения -,
противоположную по сравнению с потенциалом точки Ь. Максимальная величина выходного напряжения для мостовой схемы приближается к значению U , для дифференциальной
схемы - к значению -
Перейдем к аналитическому методу расчета статической характеристики схемы (см. рис. И8), пользуясь аппроксимацией вида (185) и ограничиваясь случаем чисто активной нагрузки.
Заметим, что используемый здесь метод спрямления вольт-амперных характеристик дросселей, как и метод спрямления анодных характеристик в электронике (см. гл. [X), является одним из частных случаев применения к расчету нелинейных цепей принципа компенсации, который сводится к замене нелинейного сопротивления комбинацией линейных сопротивлении и источников э. д. с. (или источников тока), что позволяет применять при этом виде аппроксимации принцип наложения.
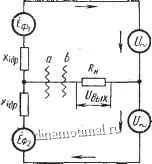
Следовательно, для расчета анализируемой схемы усилителя можно воспользоваться схемой замещения (рис. 122). Напряжения и представляют собой реальные напряжения половин обмоток питающего трансформатора, а Ёф и Еф - фиктивные (имеющие только расчетный смысл) э. д. с, которые вводятся в результате принятой аппроксимации вольт-амперных характеристик дросселя.
Рис. 122. Схема замещения цепи нагрузки схемы, приведенной на рис. 118
Действительно, выражение (185) может быть представлено в виде
др= idphf- - Ф
ИЛИ, учитывая фазовый сдвиг на угол между падением напряжения на дросселе и протекающим через него током,
др = 11 dphp - Еф-
Это уравнение показывает, что для соблюдения сдвига на угол ~
фиктивные э. д. с. должны находиться в фазе с падениями напряжения на соответствующих сопротивлениях. Тогда
Ёф = i- Еф = / X, ар (/о + КЦеА). (231)
др др
Учитывая выражение (192), будем иметь для одной пары дросселей
Ёф, = / А X, ар (/о + КI KcJcM + lex I), (232)
а для другой пары
Ёф.. = / X,- ар {1о + К[ KcmI.m - lex I ) (233)
Применим к схеме замещения (см. рис. 122) метод эквивалентного источника.
Разрывая схему в ветви нагрузки (точки разрыва а и Ь), согласно второму закону Кирхгофа имеем
U- + (j[ gt;i + 5 (j[ gt;2 = 2/Х,- dphpy
где igp - ток, обтекающий оба дросселя ненагруженной схемы. Тогда напряжение холостого хода
выЛ-О = ua8=U + Ефу- jXl gplдр,
что с учетом предыдущего выражения дает
Это обстоятельство всегда нужно учитывать при расчете подобного рода схем.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 [ 67 ] 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




