 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 [ 48 ] 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
Действительно,
f = В (Iw), - СХ
в = л 1 о raquo;в = const и с = х/л I о ./п Т = const.
Для ненагруженного элемента, когда усилие, действующее на якорь, отсутствует {F - 0), статическая характеристика Х = = / (/ш) будет также прямолинейной (см. рис. 88), причем
Х . = --(/ш), = / lt;(/ш), и угол наклона р = arctg К = arctg
С
9. ОСОБЕННОСТИ ЭЛЕКТРОМАГНИТНЫХ РЕЛЕ ПЕРЕМЕННОГО ТОКА
Под реле переменного тока подразумеваются реле, которые должны срабатывать и оставаться то или иное время включенными при питании их обмоток переменным током определенной частоты.
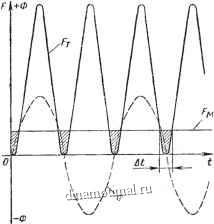
В э.пектромагнитах переменного тока магнитный поток в первом приближении (при ненасыщенном магнитопроводе) изменяется во времени по синусоиде. Тяговое усилие пропорциона.пьно квадрату погока, не зависит от его направления и в соответствии с выражением (118) меняется по закону (рис. 89):
Существенно, что в моменты перехода магнитного потока через нуль тяговое усилие также становится равным нулю, а для про межутков времени At тяговое усилие оказывается меньше противо действующих усилий F (усилие пружин, силы тяжести и т. п.). В эти моменты притянутый якорь отходит от полюсного наконечника и образуется воздушный зазор, но быстро нарастающее тяговое усилие опять вызывает притяжение якоря. В результате якорь и все подвижные детали реле вибрируют с недопустимой амплитудой. Если при этом якорь перемещает контакты, то обычно наблюдается даже полное нарушение контакта.
Для устранения этого явления на границе торца магнитопровода с воздушным зазором укрепляют массивные медные коротко-замкнутые витки, которые охватывают от половины до двух третей площади торца (рис. 90). В результате реакции со стороны витка, представляющего собой короткозамкнутую вторичную об-
мотку, магнитные потоки через охваченное и неохваченное витком сечения будут сдвинуты по фазе. В результате в воздушном зазоре будут действовать два смещенных пространственно и по фазе по-
fi=b
Рис. 89. Пульсация тягового усилия неэкранированного электромагнита переменного тока
Рис. 90. Расположение короткозамкнутого витка в электромагните переменного тока
тока, и тяговое усилие теперь не будет падать до нуля. При этом минимальное значение потока можно сделать таким, чтобы тяговое усилие в любой момент времени превосходило противодействующие усилие.
10. МАГНИТОЭЛЕКТРИЧЕСКИЕ, ЭЛЕКТРОДИНАМИЧЕСКИЕ, ИНДУКЦИОННЫЕ РЕЛЕ И ДАТЧИКИ И БЕЗЪЯКОРНЫЕ РЕЛЕ
Электрическая энергия преобразуется в движение в устройствах автоматики не только электромагнитными механизмами, но также при помощи магнитоэлектрических, электродинамических и индукционных систем. Принцип действия этих систем хорошо известен, так как они широко используются в электроизмерительных приборах.
В магнитоэлектрических системах обтекаемая входным током рамка (обмотка) поворачивается в поле постоянного магнита или в поле, создаваемом током независимого источника питания. Магнитоэлектрические реле, как и поляризованные, реагируют на знак подводимого напряжения и еще более чувствительны, чем поляризованные (мощность срабатывания до 10- вт). Однако время срабатывания чувствительных магнитоэлектрических реле велико (сотые и даже десятые доли секунды). Тем не менее магнито-
электрические системы находят применение в системах регулирования. Примером может спужить многорамочное суммирующее устройство, в котором на каждую рамку подается соответствующая составляющая сигнала, а результирующий момент является алгебраической суммой этих составляющих. С осью связан потенциометр, получающий питание от независимого источника напряжения. Снимаемое со щеток выходное напряжение одновременно подается на специальную рамку так, что поступающий в эту рамку ток вызывает противодействующий момент, стремящийся вернуть рамку в исходное положение. Подобная laquo;электрическая пружина raquo; заменяет обычные противодействующие пружины.
Магнитоэлектрические механизмы с пропорциональной зависимостью перемещения рамки от протекающего по ней тока применяются для перемещения золотников, заслонок и струйных трубок.
Электродинамические системы отличаются от магнитоэлектрических тем, что в них рамка помещается в поле, создаваемом неподвижной обмоткой, в которой также протекает входной ток. Чувствите.пьность этих систем невысока, так как основная часть входной мощности тратится на создание поля. Электродинамические системы пригодны и д.пя питания их переменным током. Существенно, что в поспеднем случае развиваемый рамкой момент будет зависеть не только от величины, но и от сдвига фаз токов, протекающих по рамке и по неподвижной обмотке.
В индукционных системах вращающий момент создается от взаимодействия магнитных по.пей статора с токами, индуктированными этими по.пями в роторе. Они фактически являются примитивными электродвигателями переменного тока с однофазным питанием.
Кроме конструктивной сложности, индукционные реле имеют такие недостатки, как зависимость параметров от частоты (а следовательно, и формы) тока, сильная зависимость от окружающей температуры, обусловленная температурным коэффициентом сопротив-.пения материа.па ротора, и сравнительно бо.пьшое время срабатывания - порядка десятков ми.плисекунд.
В последнее время находят применение магнитоуправляемые контакты (их называют laquo;герконы raquo;, МУК и т. д.), которые размещаются внутри обмотки и по существу представляют собой безъякорные реле. Контакты в виде двух пластин из ферромагнитного материала (пермаллой и др.) помещаются внутри стеклянной ампулы, наполненной аргоном (иногда водородом).
При подаче входного сигнала llg в обмотку, внутри которой расположен МУК (число их может достигать десятка), происходит намагничивание ферромагнитных пластин, возникают усилия притяжения и концы пластин образуют контакт, коммутирующий выходную цепь нагрузки. При отключении обмотки от источника пластины под действием упругих сил возвращаются в исходное состояние.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 [ 48 ] 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




