 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [ 46 ] 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
в соответствии со сказанным можно отдельно найти потоки в воздушных зазорах от постоянного магнита Ф , и Ф , и потоки от управляющих обмоток, а результирующие потоки Ф1 и Фг определить путем суммирования.
Для определения потоков от управляющих обмоток будем пользоваться схемой замещения, приведенной на рис. 84, а. Здесь {Iw)y представляет собой суммарную н.с. обеих управляющих обмоток, а R. и R - соответственно магнитные сопротивления левого и правого воздушных зазоров. При сделанных допущениях поток от управляющих обмоток одинаков в левом и правом зазорах и равен
Тогда результирующие потоки слева и справа, записанные в общем виде без учета направления потоков, соответственно равны
Ф1 = ф , +ф; (136)
Ф2 = Ф , + Ф. (137)
Потоки от постоянного магнита будем определять, пользуясь схемой замещения, изображенной на рис. 84, б. Величина (/ш) представляет собой намагничивающую еилу постоянного магнита, Rn - его магнитное сопротивление (нелинейное), а/?л,з - магнитное сопротивление воздушных зазоров в месте заделки оси якоря. Сопротивлением магнитопровода по-прежнему пренебрегаем.
Для нахождения общего потока постоянного магнита
Ф = Ф ,+Фя. (138)
необходимо располагать кривой размагничивания материала магнита, которая представляет собой часть петли гистерезиса (рис. 85, а), лежащую во втором квадранте.
Допустим, что постоянный магнит, выполненный в виде замкнутой магнитной системы (например, в виде тороида), подвергался намагничиванию до состояния насыщения, характеризуемого индукцией Тогда величина остаточной индукции равна Bq, а величина коэрцитивной силы Яр. Для конкретной конструкции кривая размагничивания в координатах В и Н легко может быть перестроена в координаты Ф и Iw (рис. 85, б), причем
Ф = В5 и /ш = Я/ ,
где S - сечение магнита;
/ - средняя длина силовой линии в магните. При этом намагничивающая сила постоянного магнита (/ш) = = Яо/ , а остаточный поток при отсутствии воздушных зазоров
= BoSn- Если магнит имеет незамкнутую форму и воздушный зазор характеризуется проводимостью G, то остаточный поток может быть найден обычным графическим приемом . Проводя из начала координат прямую под углом а = arctg (рис. 85, б), находим величину магнитного потока от постоянного магнита Ф . Как видно из графика, часть намагничивающей силы постоянного /?Л1, магнита теперь расходуется на проведе-
ние потока через воздушный зазор.
г -- | |

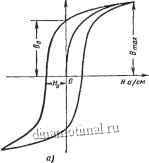

Рис. 84. Схемы замещения Рис. 85. К расчету поляризующего потока:
поляризованного реле тля гистерезиса; б - кривая размагничивания (см. рис. 81):
а - для потоков от управляющих обмоток; б - для поляризующих потоков от постоянного магнита
В нашем случае в соответствии со схемой замещения (рис. 84, 6) I 1
Rill + Rm2
Найденный таким образом общий поток постоянного магнита распределится по зазорам обратно пропорционально их магнитным сопротивлениям, т. е.
Ф , = Ф
Ф , = Фп
Rm + Rm
Rmi + Rm.2
* Здесь предполагается, что намагничивание производилось на собранном реле Если незамкнутый магнит намагничивается отдельно, то необходимо рассматривать петлю частного цикла, соответствующую изменениям проводимости воз-Душного зазора в результате сборки реле.
Пренебрегая эффектом выпучивания в воздушных зазорах, используем известное выражение (95):
/? -
откуда
где Xi - длина левого воздушного зазора; Х - длина правого воздушного зазора. Пусть якорь находится слева и ток в управляющей обмотке отсутствует. Тогда на основании формулы Максвелла сила, действующая на якорь за счет поляризующего потока, будет равна
F = F --F =- -
ф1 -ф?.
ИЛИ с учетом соотношений (139) и (140)
лап
Поскольку Х 1 gt; Xi, результирующая сила будет притягивать якорь к полюсному наконечнику. Она определяет величину контактного давления при отсутствии управляющего сигнала.
Если якорь по-прежнему находится слева, но в цепи управления появился ток, вызывающий в соответствии с выражением (135) магнитный поток Ф,, то действующая на якорь сила с учетом соотношений (136) и (137) и направлений потоков в конструкции, приведенной на рис. 81, будет
F - F F - (Ф raquo;1-Ф)-(ЧЧ + Ф) Учитывая соотношения (139), (140), получим
2Ф Ф
(X. -Ь Х,Г (Xi + Х,Г
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [ 46 ] 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




