 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 [ 44 ] 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
Этот способ основан на предположении постоянства силы гока в обмотке в течение всего процесса движения якоря, а потому дает результаты лишь самого первого приближения.
При сделанном допущении уравнение (129) принимает вид
/ = const,
причем обычно полагают / 4.
Уравнение (130) сводится к тяговой характеристике, соответствующей / = 1ераб (рис. 80, а). Механическая характеристика

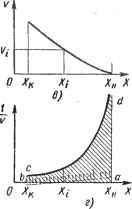
Рис. 80. К расчету времени движения реле:
а - тяговая и механическая характеристики; б - график результирующих усилий, действующих иа якорь; е - график скорости движения; г - окончательный расчетный график
[уравнение (131)1 при этом может быть любой и задается графически (рис. 80, а).
Если пренебречь вязким и сухим трением, то уравнение движения [уравнение (132)] упростится до соотношения
Рт - pM = tn
причем результирующая сила, действующая на якорь,
F = Fr-F.
в данном случае зависит только от положения якоря и легко находится графически (рис. 80, б).
Дифференциальное уравнение, соответствующее второму закону Ньютона, представим в форме теоремы об изменении кине-
тической энергии, согласно которой работа сил на пути перемещения равна приращению кинетической энергии
X: v.
\Fdx =
где и Xf - соответственно начальное и текущее положения якоря;
V, -текущая скорость якоря в положении X,. . Учитывая, что FdX = пл. СБА (рис. 80, б), получаем
1 f 2пл. Viy-;
и строим зависимость Vi = f (X) (рис. 80, в).
Располагая значениями скорости v = в разных положениях якоря, используем очевидное соотношение
для интегрирования которого строим зависимость - == ф (X)
(рис. 80, г).
Тогда
= [ -= пл. abed,
где Xk - конечное положение якоря.
В заключение отметим, что при анализе систем автоматического регулирования .в некоторых случаях можно приблизиться к реально происходящим в системе процессам, если в динамическом отношении характеризовать реле не просто запаздывающим звеном, а последовательно соединенными апериодическим и запаздывающим звеньями. При этом запаздывающее звено будет характеризовать только принятое неизменным время движения tgg, а звено апериодическое (с входной координатой - напряжение на клеммах обмотки и выходной координатой - ток в обмотке реле) - время трогания /, р(,г. Такое замещение особенно подходит для поляризованных двухпозиционных реле. У реле же нейтральных постоянные времени при срабатывании и отпускании могут отличаться очень сильно.
ХВыхтах

gt; | N lt; | ||
7. ПОЛЯРИЗОВАННЫЕ РЕЛЕ И ПОЛЯРИЗОВАННЫЕ ПРОПОРЦИОНАЛЬНЫЕ ЭЛЕМЕНТЫ
Отличие электромагнитных поляризованных реле от рассмотренных выше обычных электромагнитных реле, которые иногда называют нейтральными электромагнитными реле, заключается в том, что направление перемещения якоря у них зависит от полярности подаваемого на обмотку напряжения. Другими словами, поляризованные реле являются реверсивными элементами.
Чувствительность к полярности подаваемого напряжения при этом достигается применением двух независимых друг от друга потоков: управляющего (рабочего), создаваемого управляющей (входной) обмоткой, и неизменного по величине и направлению поляризующего потока, который создается постоянным магнитом, а в некоторых случаях - специальной поляризующей обмоткой.
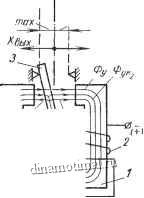
В качестве примера рассмотрим реле с дифференциальной магнитной цепью (рис. 81), в котором в одной части воздушного зазора поляризующий и управляющий потоки складываются, а в другой вычитаются.
Пусть якорь 3 свободно вращается на оси и при невозбужденной обмотке 2 может располагаться либо слева, либо справа, но не удерживается в среднем положении, которое является неустойчивым. Такая конструкция называется двухпозиционной.
Допустим, что при обесточенной обмотке якорь находится слева. Тогда магнитные потоки слева и справа соответственно будут равны
Ф1 = ф и Ф2 = Ф laquo;,.
Поскольку левый зазор меньше правого, магнитный поток слева будет более сильным:
Ф1 gt; Фа
И результирующая сила, действующая на якорь, также будет направлена влево.
При наличии входного сигнала в зависимости от его полярности магнитные потоки в одном из воздушных зазоров будут складываться, а в другом вычитаться.
Рис. 81. Магнитная система поляризованного электромагнитного элемента с дифференциальной магнитной цепью:
/ - магнитопровод; 2 - управляющая (входная) обмотка; 3 - якорь
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 [ 44 ] 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




