 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 [ 113 ] 114 115 116 117 118 119 120 121 122 123 124 125 126 127
зуется в пропорциональный ему интервал времени ti, затем этот интервал преобразуется в соответствующее число импульсов.
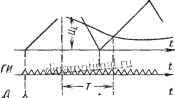
Генератор импульсов ГИ выдает последовательность импульсов, причем через делитель частоты Д (т. е. через строго определенное число импульсов) запускается генератор пилообразного напряжения ГП и одновременно через пусковую схему Я открывается вентиль В; импульсы начинают поступать в счегчик Сч. В тот момент, когда мгновенное значение преобразуемого напряжения Ui становится равным мгновенному значению пилообразного напряжения Игп, срабатывает схема сравнения СС и через пуско
I
1 1 Сч Лллллл! Лл 1 | |||
Рис. 203. Схема преобразователя напряжения в число импульсов: а - блок-схема; б - временная диаграмма
вую схему П закрывает вентиль В; поступление импульсов в счетчик в этот момент прекращается. Тогда временной интервал между началом и концом поступления импульсов в счетчик будет равен
U-jjx, (383)
где Urn - максимальное значение пилообразного напряжения;
т - длительность нарастания пилообразного напряжения от нуля до максимума. Интервал времени ti определит число импульсов на счетчике. Этот интервал и будет являться дискретным эквивалентом напряжения Ui.
В прямых преобразователях, построенных по принципу сравнения и вычитания, имеегся набор эталонных напряжений, равных, например, и т. д. от полного эталонного напряжения и составляющих в сумме полное эталонное напряжение. С помощью специальной переключающей схемы устанавливается сумма эталонных напряжений, которая полностью (с точностью
до - уравновешивает преобразующее напряжение. Соответсгвую-
щее этому равновесному положению состояние переключающих устройств и будет отображать в дискретной форме мгновенное значение преобразуемого напряжения.
Другой тип прямых преобразователей, построенных по тому же принципу, представляет собой систему автоматического регулирования, работающую в следящем режиме так, что выходная величина в дискретной форме приводится в соответствие с преобразуемым напряжением, которое выполняет роль задающей величины; их разность, т. е. рассогласование системы, будет определять ошибку, которую можно вычислить с помощью общих методов теории автоматического регулирования.
Прямые преобразователи, построенные по принципу одного отсчета, чаще всего применяются для преобразования углового положения оси в код. В распространенном варианте на оси закрепляется диск, на котором выполнены уже не простейшие вырезы, как в ранее рассмотренном случае, а сложная кодовая сегка. Эта сетка выполнена так, что каждому положению оси (в пределах принятой точности отсчета) соответствует определенная комбинация освещенных и затемненных элементов.
Перейдем к обратным преобразователям, которые могут быть разбиты на три группы.
В первой группе преобразуются импульсы в единичные приращения непрерывной величины. Для этой цели может быть использован, например, шаговый электромагнитный двигатель (см. рис. 198), который при каждом импульсе поворачивает выходной вал на определенный угол.
В обратных преобразователях второй группы суммируюгся импульсы напряжения или тока.
Обратные преобразователи третьей группы представляют собой следящие системы, в которых напряжение в дискретной форме является задающей величиной, а выходное напряжение -величиной непрерывной.
Изложенные сведения дают лишь общее представление о методах преобразования. Конкретное исполнение преобразователей отличается большим разнообразием.
6. ЦИФРОВАЯ МАШИНА КАК ЭЛЕМЕНТ РЕГУЛЯТОРА
Управляющие машины, помимо их специфических функций, могут выполнять в регуляторе различные типовые функции - задатчика, сравнивающего элемента, корректирующего элемента и др. Только функции воспринимающего и исполнительного элементов, а также задачи усиления сигнала всегда выполняются вне машины. Рассмотрим, каким должен быть подход к замещению цифровой управляющей машины типовыми звеньями, если она
выполняет одновременно одну из типовых функций элементов регулятора.
Предположим, что цифровой машиной заменяется корректирующий элемент (см. рис. 26). При этом может наблюдаться нежелательное изменение передаточной функции, которое прежде всего связано с необходимостью перевода сигнала из непрерывной формы в дискретную и обратно.
Выполнение дифференцирования дискретной машиной будет сопровождаться специфическими искажениями, отличными от искажений, появляющихся при дифференцировании непрерывной величины фильтром по схеме, приведенной на рис. 26. В последнем случае, как известно, искажение заключается в том, что передаточная функция этой схемы имеет вид уравнения (172) вместо уравне ния (356) для идеального дифференцирующего звена. Если операцию дифференцирования выполняет машина дискретного действия, то даже при столь быстром выполнении этой операции, когда временем, потребным на ее выполнение, можно пренебречь, произвести эту операцию с переходом к пределу невозможно.
Действительно, операция дифференцирования определяется соотношением
Поскольку временной интервал Т между двумя соседними замерами остается конечным, цифровая машина в этих условиях может дать лишь приближенный результат, определяемый разностным уравнением:
..(0----. (385)
К непрерывным величинам в импульсной форме также может быть применено преобразование Лапласа и выражение (385) в операторной форме примет вид (см. п. 1, гл. III)
и вых (Р) = -f---,
где звездочки указывают, что переход к операторной форме был произведен по правилам для дискретных величин.
Соответственно передаточная функция машины как дифференцирующего звена будет
1*(Р)==%-=f, (386)
т. е. она содержит звено с постоянным запаздыванием.
Разлагая показательную функцию в степенной ряд, нетрудно убедиться, что с уменьшением интервала Т передаточная функция
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 [ 113 ] 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




