 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 [ 103 ] 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
ных и двух интегралах уравнение идеального корректирующего устройства, очевидно, должно иметь вид
1 t t
Хеьи it) = К-2 \ di f Xsx (t) dt + K-i f (t) dt + KoXex (t) +
0 0 0
+ A1 ---b Ki --, (354)
ЧТО соответствует передаточной функции
ip) = -~+-~ + К, + К,р + КР- (355)
Гораздо чаще ограничиваются введением одной производной или одного интеграла, либо одной производной и одного интеграла одновременно. В .этом случае
W (р) = KtP (356)
И7(р) = . (357)
Если гребутся, чтобы выходной сигнал содержал также и составляющую, пропорциональную самому входному сигналу, передаточные функции должны иметь вид
W(p) = K,+ K,p (358)
или
W(p) = Ko + . (359)
Корректирующее устройство с передаточной функцией вида (358) иногда называют стабилизирующим звеном.
Если необходимо, чтобы выходной сигнал содержал три составляющие - пропорциональные входному сигналу, его первой производной и интегралу, то получается интегро-дифференцирующее корректирующее устройство с передаточной функцией
(р) = - + К,+КгР- (360)
Кроме корректирующих устройств с указанными передаточными функциями, достаточно часто требуются корректирующие устройства, дающие на выходе вторую производную от входного сигнала. Такие устройства, очевидно, представляют собой дифференцирующие звенья второго порядка и могут быть получены последовательным включением двух дифференцирующих звеньев первого порядка с передаточной функцией вида (356). Приведенные
выше передаточные функции соответствуют идеальным звеньям, которые практически могут быть реализованы только приближенно.
Для повышения точности выполнения требуемых операций корректирующие устройства должны быть активными.
В результате возникают значительные конструктивные усложнения, которые заставляют чаще всего идти по пути использования пассивных корректирующих устройств, несмотря на пониженную точность воспроизведения ими требуемых передаточных функций.
Рассмотрим наиболее распространенные схемы пассивных корректирующих цепей.
3. ДИФФЕРЕНЦИРУЮЩИЕ КОНТУРЫ
Назначение дифференцирующих контуров - уменьшение влияния инерционности объекта регулирования и элементов регулятора (см. рис. 2) на качество регулирования.
Если на входе апериодического звена действуют гармонические колебания, то в установившемся (точнее принужденном) режиме запаздывание проявляется в отставании фазы выходных колебаний относительно входных. Следовательно, для компенсации влияния инерционности требуется ввести в регулятор элемент, создающий опережающий сдвиг фазы, причем вполне достаточно, чтобы вводимый элемент обеспечивал компенсацию фазы лишь в рабочем диапазоне частот, т. е. в пределах полосы пропускания системы. Таким элементом является уже рассмотренный ранее приведенный контур (см. рис. 26).
Представим себе, что апериодическое звено с коэффициентом передачи /( = 1 и дифференцирующий контур имеют одинаковые постоянные времени и параллельно и согласно включены. Согласно выражению (19) их эквивалентная передаточная функция будет
т. е. в первом приближении вносимое апериодическим звеном запаздывание оказалось скомпенсиоованным (см. графики на рис. 185).
Здесь осуществляется компенсация запаздывания только в одном звене. Гораздо целесообразнее с помощью одного дифференцирующего контура оказать воздействие на целую группу инерционных звеньев. Обычно желательно, чтобы форсирующая составляющая по своему характеру приближалась к производной от основного сигнала.
Представление конструктивного элемента одним из элементарных звеньев всегда является приближенным (см. гл. III).
Передаточная функция простейшего дифференцирующего контура (см. п. 2, гл. III) имеет вид
W(P) =
Тр
Тр+ 1
Аналитическое выражение амплитудно-фазовой характеристики контура получим, заменив р = /оз:
/соГ
Для более или менее точного выполнения дифференцирования синусоидального сигнала с частотой оз необходимо, чтобы имело место соотношение
соТ laquo; 1.
Обычно выбирают шТ = 0,1-ь0,2. Тогда W (/ю) ; /юТ = (О Те 2 ,
(361)
что соответствует аналитическому выражению амплитудно-фа-
t О
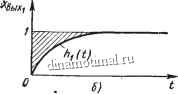
Рис. 185. Опережающее действие дифференцирующего контура:
а - воздействие иа входе (единичная функция); б - переходная функция апериодического звена; в - переходная функция дифференцирующего контура; г - суммарная переходная функция
зовой характеристики идеального дифференцирующего звена с передаточной функцией вида (356).
Нетрудно видеть, что соблюдение условия озТ lt; 1 возможно только при уменьшении постоянной времени контура Т, причем величина Т должна быть тем меньше, чем выше частота передаваемых сигналов. Но при этом, как следует из выражения (361), Пропорционально уменьшению постоянной времени уменьшается
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 [ 103 ] 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




