 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 [ 94 ] 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
вращения, используются тахогенераторы и статические схемы, состоящие из различных сопротивлений. В качестве примеров рассмотрим следящие приводы с двигателями постоянного тока и асинхронным.
sect; 7. 8. Следящий привод с электромашинным усилителем и двигателем постоянного тока
Принципиальная схема такого привода изображена на рйс. 7.П. Она содержит сельсин-датчик СД и сельсин-трансформатор СТ, фазочувствительный полупроводниковый или электронный усилитель ФУ с входным и выходным трансформатора-. ми, электромашинный усилитель ЭМУ с двумя встречно включенными обмотками управления ОУ1 и ОУц, исполнительный двигатель постоянного тока с независимым возбуждением ИД и корректирующее устройство КК, например, в виде контура г, С. Если между входным -и выходным [е, je звеньями не имеет-- / / ся рассогласования, то напряжение на обмотке управления сельсина-транс-фср -м атор а отсутствует и ГОКИ в обмотках управления ЭМУ одинаковы по величине. Магнитный поток, создаваемый этими обмотками, включен н ы м и встречно, равен нулю; равным образом отсутствует напряжение на выходе ЭМУ и двигатель неподвижен. Если создается рассогласование (по- воротом СД), на обмотке управления сельсина-трансформатора появляется напряжение, почти пропорциональное синусу угла рассогласования. При этом токи в обмотках управления ЭМУ изменяются в разных направлениях - в одной ток снижается, 3 в другой - возрастает. Обмотки управления ЭМУ создают Магнитный поток, пропорциональный синусу угла рассогласования. Соответствующее напряжение, появляющееся на продольных щетках ЭМУ, подводится к якорю исполнительного двигателя. Вращаясь со скоростью, пропорциональной напряжению якоря, двигатель восстанавливает согласованное положение
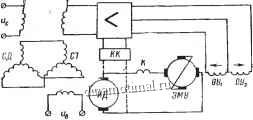
Рис. 7.11. Упрощенная схема следящего привода с ЭМУ и исполнительным двигателем постоянного тока
входного и выходного органов, при котором управляющее напряжение равно нулю. Если сельсин-датчик повернется в противоположном направлении, то изменяется на обратное направление магнитного потока, напряжения ЭМУ и скорость вращения двигателя, п этим вновь обеспечивается согласованное положение звеньев. Слежение выходного вала за входным происходит также и в процессе вращения последнего с изменяющейся до определенного предела скоростью.
Анализ всей системы требует определения передаточных функций ее отдельных элементов. Для сельсинов, измеряющих угол рассогласования, эта функция равна k. Действительно, как известно из предыдущего, э. д. с. обмотки управления сельсина-трансформатора для небольших углов рассогласования
ву = kc sin е kcP,
откуда
Передаточная функция полупроводникового или электронного усилителя также выражается постоянной, равной коэффициенту усиления ky.
Уравнение напряжений обмоток управления для электромашинного усилителя
fyiy + Lypiy = Uy,
Typiy + iy = -
(7.50)
где Ту = --постоянная времени цепи управления.
Без учета насыщения
eg = kgiy. (7.51 )
Уравнение напряжений для поперечной короткозамкнутой цепи
(7.52)
где Тд = --постоянная времени поперечной цепи.
В линейной области
Из уравнений (7.50) -(7.53) получаем:
. . TyTgPea-\-{Ty+Tg)pea + ea = kyxky2Uy, (7.54)
где kyx-~ - -fj--коэффициент усиления напряжения
первой ступени;
ky2- ~~ = --коэффициент усиления напряжения
Гд 1дГд
второй ступени. Передаточная функция как отношение изображений выходной э. д. с. и входного напряжения без учета постоянной времени продольной цепи имеет вид
При приближенном анализе пренебрегают постоянной времени цепи управления. В этом случае
Здесь ki = kyiky2 - коэффициент усиления.
Для двигателя постоянного тока, управляемого со стороны якоря, уравнение движения
Ж-Же = /роо. , (7.57)
Уравнение напряжений цепи якоря
и = е + n + Lpi. (7.58)
Будем считать поток неизменным, э. д. с. якоря е=СеСоФ, тогда
и = ссоФ + ri + Lpl. (7.59 gt;
Вращающий момент двигателя
М = с 1Ф. (7.60)
Подстановка (7.60) в (7.57) дает: gt;
с гФ - Же =/роо. . (7.61) В случае Мс=0 ток якоря
.-рш (7.62)
и его производная
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 [ 94 ] 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




