 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 [ 57 ] 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
мощности (момент вращения обратно пропорционален скорости) . Следует отметить, что данный способ регулирования отличается высоким к. п. д., хорошей плавностью и удобством управления, широко применяется на практике.
Область, в которой скорость вращения уменьшается при сниленин потока, относится к регулированию скорости двигателей малой мощности, имеющих большое значение относительного сопротивления якоря. Те же кривые (см. рис. 4.22) иллюстрируют отличительное свойство регулирования в этой области-с уменьшением потока скорость молет снижаться до нуля, что обуславливает большой диапазон регулирования.. В этом случае к. п. д. двигателя оказывается небольшим.
f-0 +
*- j
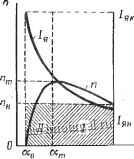
Рис. 4.23. Зависимость скорости и тока якоря двигателя от коэффициента шунтирования
Двигатель последовательного возбуждения. Регулирование скорости вращения двигателя последовательного возбуждения изменением магнитного потока (тока возбуждения) практически осуществляется включением добавочного сопротивления (регулировочного реостата) параллельно обмотке возбуждения или обмотке якоря (рис. 4.23). В первом случае при заданном токе якоря магнитный поток может быть уменьшен, во втором - увеличен. Соответственно этому скорость вращения можно изменять в сторону увеличения или уменьшения. Для схемы с шунтированием обмотки возбулодения (см. рис. 4.23 без пунктирной ветви)
(4.42)
где а =
коэффициент шунтирования.
. Магнитный поток возбуждения с учетом насыщения
(4.43)
где А - коэффициент магнитного насыщения.
Скоростная характеристика
Вращающий момент
М = ao.c kJl. (4.45)
Механическая характеристика
% . п =---fei. . (4.46)
- yaacky/vl
В этом уравнении коэффициент щунтирования а и вращающий момент М - величины изменяющиеся. Если М = const, то * скорость вращения имеет максимум при коэффициенте шунтирования
---Шг- .
Последнее находится из условия
= 0.
f. Зависимости скорости вращения и тока якоря двигателя от 1? коэффициента шунтирования а при постоянном моменте изображены на рис. 4.23. Как и в предыдущем случае, здесь также имеются две характерные области: первая ат lt;а lt;1, в которой
г , скорость вращения растет с уменьшением тока возбуждения или коэффициента шунтирования /в=а/ , и вторая ао lt;а lt;ат, где скорость снижается с уменьшением тока возбуждения. В приводах, как правило, осуществляется регулирование, соот- ветствующее первой области, отличающейся сравнительно малым током якоря и высоким к. п. д. Диапазон регулирования обычно не превосходит на практике 2: 1, вследствие ограничивающего влияния таких основных факторов, как нагрев и коммутация двигателя. Для рассматриваемой области зависимости скорости от момента вращения при различных постоянных значениях а представлены кривыми (/, 2 на рис. 4.24). Во второй . области (ао lt;а lt;ато), где скорость падает от максимальной величины при а=ат ДО нулевой при а=ао, коэффициент полезного действия низок из-за больших потерь в якоре и реостате. Такое регулирование применяется лишь в двигателях малой мощности, для которых величина к. п. д. не имеет большого значения. Диапазон регулирования в этой области может быть
большим, чем в первой. Оценивая в целом способ регулирования скорости двигателя последовательного возбуждения, основанный на шунтировании обмотки возбуждения, можно сказать, что он характеризуется сравнительно высоким к. п. д., малой мощностью управления и удобством. Вместе с тем он отличается сравнительно небольшим диапазоном регулирования и недостаточной жесткостью механических характеристик.
Как отмечалось выше, шунтирование обмотки якоря позволяет увеличить поток при заданном токе якоря, а следовательно, регулировать скорость вниз от номинальной. Механические характеристики в этом случае располагаются ниже естественной (кривые 4 и 5 на рис. 4.24). В энергетическом отношении этот способ весьма несовершенен ввиду низких значений к. п. д. Поэтому он применяется обычно в случае кратковременного снижения скорости вращения установки.
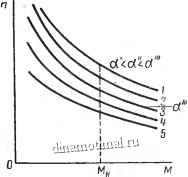
Рис. 4.24. Механические характеристики двигателя с последовательным возбуждением:
!, 2 -.при шунтировании обмотки возбуждения; 3 - естествен-
ная;
4, 5 - прн шунтировании обмотки якоря
sect; 4. 14. Сопоставление методов регулирования скорости вращения электроприводов и перспективы их развития
По регулировочным свойствам электродвигатели располагаются в ряд: коллекторные двигатели постоянного и переменного тока, бесколлекторные асинхронные и синхронные двигатели. Хорошие регулировочные свойства коллекторных машин получаются за счет усложнения конструкции, увеличения: стоимости и уменьшения надежности в работе по сравнению с бесколлекторными машинами переменного тока. В настоящее время наилучшими возможностями регулирования и управления отличаются электроприводы постоянного тока по системе генератор - двигатель.
В ряде текстильных машин, преимущественно отделочного производства, электроприводы по схеме Г-Д находят пока зна-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 [ 57 ] 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




