 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 [ 56 ] 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
графическим путем. Уравнение напряжений для главной цепи без учета высших гармоник тока и напряжения
на обмотках переменного
(4.37)
тока- уси-
Здесь
Ох- напряжение лителя;
Гх и х-х сопротивление этих обмоток;
СУз - напряжение на выпрямленном участке цепи (выпрямитель, якорь и обмотка обратной связи); A-j - сопротивления выпрямителя j и обмотки обратной связи, приведенные к, цепи переменного тока; , .
Гя - сопротивле ние якоря, приведенное к цепи переменного тока;
= laquo;Ф- приведенная э. д. с. якоря. Принимая 1хх gt; Ui, = г, + Г2 -f / я, имеем:
= U2+jUx. (4.38)
Основываясь на (4.38) и зная зависимость напряжения на рабочих обмотках усилителя от тока в этих обмотках при различных величинах тока управления t/i=9(/у), можно графически найти потребную величину тока управления /у для заданной скорости вращения. Указанные зависимости в форме Ui=(p{IiR) для различных токов управления /у строятся с одина-масштабом по
ковым обеим осям (рис. 4.21,0).
координат
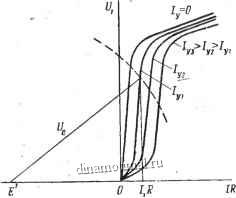
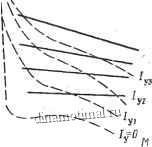
Рис. 4.21. Характеристики двигателя управляемого МУ с выпрямителем:
а) графическое определение тока управления;
б) механические характерястшш: .---без
обратной связи, с обратной связью
Вправо от начала координат откладывается падение IiR напряжения для заданного тока якоря, а влево - э. д. с. якоря, пропорциональная скорости вращения. Точка пересечения дуги окружности радиуса, равного С/с. с линией IiR, параллельной оси ординат, определяет величину тока управления. По тем же зависимостям (см. рис. 4.21, с) можно построить механические характеристики двигателя при различных постоянных значениях тока управления. Эти характеристики при отсутствии обратной связи имеют недостаточную жесткость (рис. 4.21,6). Жесткость механических характеристик может быть значительно повышена путем введения обратной связи по току якоря и скорости вращения,
sect; 4. 13. Регулирование скорости вращения двигателей постоянного тока изменением тока возбуждения
Двигатель независимого возбуждения. Из уравнения механической характеристики
и Мг
следует, что скорость вращения растет по гиперболической кривой при снижении магнитного потока.
Скорость идеального холостого хода
Когда двигатель нагружен, характер изменения скорости вращения зависит не только от магнитного потока, но и от величины момента сопротивления. Механические характеристики двигателя для разных значений потока, изображенные на рис. 2.17,0, показывают, что теоретически со снижением потока скорость может и возрастать и уменьшаться. Выясним, как изменяется скорость вращения в зависимости от потока, когда вращающий момент, приложенное напряжение и сопротивление цепи якоря сохраняются постоянными. Разделив обе части уравнения (2.45) на По, умножив и разделив знаменатель второго члена правой части на поток Ф,? и ток / , получим:
v = -f-p-. . (4-39)
Здесь все величины выражены в относительных единицах:
Магнитный поток, соответствующий максимальному значению скорости вращения, определяемый из условия =0,
Максимальная в (4.39):
ср = 2\p.
скорость находится
(4.40)
подстановкой (4.40) (4.41)
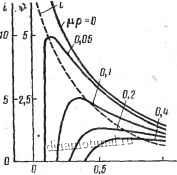
Семейство зависимостей скорости вращения от магнитного потока при постоянных значениях произведения np=const, построенных по-уравнению (4.39), приведено на рис. 4.22. Из этого рисунка видно, что в области, где ф gt;2лр, скорость вращения уменьшается, а в области, где Ф lt;C2lp, растет по мере увеличения магнитного потока. На этом же графике нанесена кривая тока якоря i, изменяющаяся по гиперболе в зависимости от потока и при постоянном вращающем моменте.
Область, в которой скорость вращения возрастает с уменьшением потока, относится к регулированию скорости вращения двигателей сравнительно большой мощности, имеющих малое сопротивление р. В этом случае номинальная скорость при номинальном магнитном потоке является в то же время и минимальной скоростью; регулирование практически протекает в области, где скорость вращения больше ее номинального значения. Максимальная скорость и диапазон регулирования ограничиваются здесь в основном допустимым нагревом от потерь, пропорциональных квадрату тока якоря, условиями коммутации, связанными с реактивной э. д. с, зависящей от скорости и тока якоря. Имеет также значение снижение жесткости механических характеристик при ослаблении магнитного потока. Рациональный диапазон регулирования скорости изменением потока не превосходит обычно величины порядка 3:1. Размеры и стоимость двигателя с увеличением диапазона регулирования увеличиваются вследствие снижения основной номинальной скорости вращения и ухудшения условий коммутации. Поскольку допустимый по условиям нагрева обмоток ток якоря почти не меняется, регулирование может осуществляться при постоянной электромагнитной
1.0 If
Рис. 4.22. Зависимости скорости от потока двигателя постоянного тока при различных значениях {р.р)
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 [ 56 ] 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




