 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 [ 22 ] 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
После дифференцирования магнитной проводимости по перемещению получаем:
F=0,4- 10-7 (A-i + 0.5g) щ2 , (2.81)
Здесь линейные размеры можно взять в любых единицах, намагничивающую силу - в амперах.
Вращающий момент поворотного электромагнита. Вращающий момент поворотного электромагнита (рис. 2.28,5) находится по (2.78) без учета потока рассеяния и магнитного сопротивления стали. Магнитная проводимость элементарного слоя сечением h-dR (ft-ширина якоря) и длиной aR будет:
dG =
Полная проводимость воздушного зазора я,
G = f /G = In
Вращающий момент
М = 0,5 {Iwf
(2.82)
Характеристика тягового усилия в зависимости от хода теоретически, без учета магнитного рассеяния и насыщения стали, выражается квадратичной гиперболой (кривая / на рис. 2.29). С учетом указанных факторов она представлена в виде кривой 2 (см. рис. 2.29). Тяговое усилие и вращающий момент, как это показывают полученные формулы, пропорциональны квадрату намагничивающей силы или тока катушки. Изменение напряжения, приложенного к последней, очевидно, будет сильно
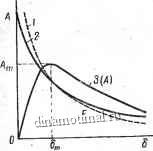

Рис. 2.29. Характеристики электромагнитов:
1,2 - тяговые; 3 - полезной работы
Рис. 2.30. Тяговые характеристики электромагнитов:
а) с плоским концом якоря;
б) с цилиндрическим концом; в) с коянчесжим концом якоря
влиять на величину тягового усилия. Для втяжных электромагнитов с плоским концом якоря, как это видно из (2.80), тяговое усилие обратно пропорционально квадрату длины воздушного зазора. Форма кривой тягового усилия в значительной мере зависит от формы конца якоря. На рис. 2.30 приведены для сравнения тяговые характеристики втяжного электромагнита с плоским концом (а), электромагнита с цилиндрическим концом (б) и с коническим концом якоря (в).
Второй важной характеристикой электромагнита является его полезная работа
А = п. (2.83)
Отношение полезной работы к общей, включающей, кроме полезной работы, еще и энергию, затраченную на ускорение движения, называется механическим к. п. д. электромагнита. Характеристика полезной работы Рб=(р{Ь) показана кривой 3, (см. рис. 2.29). Она имеет при некотором значении длины воздушного зазора максимальное значение Am- При максимальной полезной работе Получается наилучшая работоспособность электромагнита. При заданных условиях работы (тяговое уси-.чие, ход якоря) существует определенный тип электромагнита, являющийся наиболее экономичным. Электромагнит считается наиболее экономичным, если его вес на единицу полезной работы минимален. Характеристики электромагнитов сильно зависят от их конструкции. В частности, значительное влияние на них оказывает форма конца якоря втяжного электромагнита.
Втяжные электромагниты с коническим и в особенности с цилиндрическим концом якоря выгодно применять для механизмов с меньшей величиной тягового усилия и большем ходе якоря. Как силовой привод электромагнит отличается простотой конструкции, надежностью работы, быстродействием (время срабатывания не более 0,1 сек), наличием значительных электромагнитных усилий, малыми габаритами и весом. Однако электромагнит имеет свойство, ограничивающее его применение в качестве силового привода: невозможность больших перемещений, реверсирования и регулирования скорости движения якоря. Здесь не рассматриваются электромагниты переменного тока, а также специальные машины возвратно-поступательного движения ввиду ограниченного объема пособия.
Глава III
СРЕДСТВА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
sect; 8. 1. Основные положения
Управление современными электроприводами осуществляется с помощью различных, преимущественно электротехнических, устройств. Основными из них являются: командные аппараты и другие входные элементы; реле и другие логические элементы; контакторы; магнитные пускатели; автоматы; тормозные устройства; электрические сопротивления; усилители; преобразователи; электрические микромашины; электромагнитные муфты; устройства обратной связи; унифицированные блоки; вычислительные устройства и машины.
; Основные звенья следящих приводов: измерители рассогласования, преобразователи сигнала рассогласования (модуляторы и демодуляторы), усилители и стабилизирующие устройства.
Автоматическая защита электроприводов от аварийных и других недопустимых режимов осуществляется реле защиты, автоматами, реже предохранителями. Каждый из упомянутых элементов может иметь различные конструктивные формы и технические данные. Однако по устройству и рабочим свойствам они подразделяются на две группы: релейно-контактор-ная аппаратура и бесконтактные средства управления.
Средства управления и защиты выполняют ответственную роль в системах автоматизированных электроприводов. Их качество во многом дпределяет совершенство электропривода, его надежность, производительность, стоимость и срок службы.*
sect; 8. 2. Командные аппараты
Командный аппарат представляет собой устройство, предназначенное для подачи команды о начале, прекращении или протекании в определенном порядке какой-нибудь операции или режима. Командные аппараты являются входными устройствами дискретного (прерывистого) действия. Эти аппараты могут
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 [ 22 ] 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




