 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 [ 21 ] 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 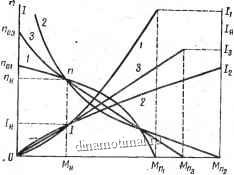
Механические характеристики двигателей последовательного возбуждения являются мягкими, у двигателей параллельного возбуждения - жесткими и двигателей смешанного (согласного) - занимают промежуточное положение между двумя первыми. При разгрузке до холостого хода скорость вращения двигателя последовательного возбуждения резко возрастает до большой величины (nopHJaKa 3-6-кратной) и незначительно -
у двигателя параллельного возбуждения. Величина скорости . холостого х-ода двигателя смешанного (согласного) возбуждения умеренно превосходит номинальную скорость.
По степени зависимости вращающего момента от тока якоря двигатели параллельного и последовательного возбуждения также занимают крайние положения, а смешанного - промежуточное. Кратность пускового вращающего момента наиболее высокая у двигателя последовательного возбуждения, значительная у двигателя смешанного (согласного) возбуждения и сравнительно меньшая у двигателей параллельного возбуждения.
Токи (мощности), потребляемые двигателями различного возбуждения, в разной мере зависят от момента на валу. У двигателя последовательного возбуждения ток якоря пропорционален моменту в степени, меньшей единицы, а у двигателя параллельного возбуждения - в степени, большей единицы. Пусковой Ток - наибольший у двигателя параллельного возбуждения и сравнительно меньший - у двигателя последовательного возбуждения. При снижениях напряжения в области сравнительно небольших нагрузок скорость вращения двигателя параллельного возбуждения сохраняется почти постоянной. При перегрузках и при пуске в ход двигатель параллельного возбуждения более чувствителен к посадкам напряжения, чем двигатель последовательного возбуждения. Пусковой вращающий момент первого сильно уменьшается со снижением напряжения вследствие уменьшения не только тока якоря, но и. магнитного потока.
Возможностьк) рекуперативного торможения обладают двигатели с параллельным и смешанным возбуждениями. Двига-
Рис. 2.27. Механические характеристики и зависимости тока якоря от момента вращения двигателей с различными способами возбуждения
телй последовательного возбуждения лишены этого свойства. Остальные виды торможения доступны двигателям всех систем возбуждения.
Выбор типа двигателя определяется соответствием его электромеханических свойств требованиям рабочей машины или механизма, условиями эксплуатации и факторами экономического характера.
sect; 2. 16. Характеристики электромагнитных механизмов
Электромагнитные механизмы находят многообразное применение в автоматике. Они используются также в качестве силового привода. По устройству электромагниты делятся на втяжные и с поворотным якорем. По роду тока они подразделяются на электромагниты постоянного и переменного тока.
Основной характеристикой электромагнита является зависимость тягового усилия от хода якоря =ф(б), называемой тяговой характеристикой. Общая формула для электромагнитной силы, действующей на якорь электромагнита, получается дифференцированием магнитной энергии системы по перемещению якоря:
F= sect; = 0,5{Iwr sect;, (2.77)
так как А = 0,5 Ф {Iw), Ф = {1т)0, где G -магнитная проводимость системы.
Сила выражается в джоулях на сантиметр, если намагничивающая сила берется в амперах, магнитная проводимость в генри, а перемещение в сантиметрах.
Для электромагнита с поворотным якорем вращающий момент
М = 0,5 {Iwy , (2.78)
где а - угол поворота якоря в радианах. Выражение для электромагнитной силы приобретает другую форму при А = - LP:
F=0,5P% (2.79)
Рассмотрим характерные частные случаи. Электромагнитная сила между параллельными плоскими поверхностями. Этот случай соответствует прямоходовому втяж-
ному электромагниту с плоским концом якоря (рис. 2.28,а). Без учета потока рассеяния и магнитного сопротивления стали будем иметь для магнитной проводимости:
dG Po5
db db

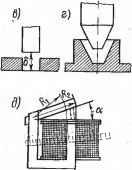
Рис. 2.28. Конструктивные формы электромагнитов:
а) втяжной с плоским концом якоря; б) поток между цилиндричеокими поверхностями; в) с цилиндрическим концом якоря; г) с коничеоким концом якоря; д) с поворотным якорем.
Так как зазор о уменьшается при втягивании якоря, db = - db, то
(2.80)
Здесь / - электромагнитная сила, дж/см; - Iw ~ намагничивающая сила, а; 5-площадь зазора, cw; 8 -длина зазора, см;
Б -индукция, вб[см-; ..
\Q = 0,4 т. 10- гн,см.
Электромагнитная сила от потока утечки между цилиндрическими поверхностями. Во втяжных системах общую силу, действующую на якорь, можно рассматривать как сумму двух составляющих: основной, соответствующей случаю, изображенному на рис. 2.28, а, и дополнительной, обусловленной взаимодействием потока утечки Фу с током катушки (рис. 2.28,6). Не учитывая поток выпучивания, будем иметь:
G = ; / = g-; 5 = 2тг (г, + 0.5 sect;)8.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 [ 21 ] 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




