 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [ 17 ] 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
(рис. 2.18, а, б; А и А, Б и Б, В и В) при независимом возбуждении. Схемы (см. рис. 2.18, а) относятся к одному направлению вращения, а схемы (см. рис. 2.18,6)-к противоположному направлению вращения при тормозных режимах по сравнеч нию с двигательным.
Рекуперативное торможение. Якорь двигателя приводится во вращение моментом механизма со скоростью, превосходящей скорость идеального холостого хода. Э. д. с. якоря при том же потоке больше напряжения сети, что приводит к изменению направления тока якоря, мощности и электромагнитного момента (в случае неизменного направления скорости и изменении знака момента механизма на обратный). Если момент механизма сохраняет свое направление, то скорость якоря имеет обратный знак (см. рис. 2.18,6; А). Такой случай возникает, например, при опускании краном тяжелого груза.
Торможение противо включением. При противо-включении машина работает в качестве электромагнитного тормоза, потребляя электрическую мощность из сети. Возможны две разновидности торможения:
а) изменением направления .тока якоря и электромагнитного момента переключением полярности подводимого к якорю напряжения. Моменты, развиваемые двигателем и рабочим механизмом, действуют согласно в направлении, обратном направлению вращения якоря, скорость которого снижается до нуля и затем может изменить свое направление на обратное, если двигатель не отключить от сеТи при скорости, равной нулю (см. рис. 2.18,а; Б). Такая разновидность торможения применяется в механизмах с реактивным статическим моментом, изменяющим свое направление вместе со скоростью, если необходима его быстрая остановка;
б) вращением якоря в направлении момента рабочего механизма с противодействующим электромагнитным моментом. Это можно достигнуть посредством включения в цепь якоря добавочного сопротивления, без перемены полярности напряжения якоря в приводах с активным моментом механизма, сохраняющим знак при изменении направления вращения, например в крановых установках (см. рис. 2.18,6; Б).
Дина ми ческое торможение. Отсоединенный от сети якорь замыкается на сопротивление г. и машина переходит в генераторный режим с независимым возбуждением за счет запасенной кинетической энергии установки. Электромагнитный момент в начале режима, изменив знак на обратный, действует согласно с моментом механизма в направлении, противоположном скорости вращения якоря. Скорость двигателя быстро снижается до нуля. Если момент рабочего механизма при этом сохраняет свое направление и достаточную величину (крановая установка), то скорость вращения якоря изменяет направление
на обратное под действием упомянутого момента. Величина этой йкорости достигает установившегося значения при равенстве моментов Мс=М.
Из сопоставления рассмотренных способов торможения вытекают следующие положения. Наибольшую интенсивность торможения обеспечивает- противовключеине, обладающее, однако, самыми низкими энергетическими показателями и возможностью самореверсирования. Динамическое торможение более экономично, более плавно и исключает возможность само-ревёрсирования; его тормозное действие ослабляется по мере снижения скорости вращения или совсем исчезает при отсутствии возбуждения. Наиболее экономичным явля-
;.ется рекуперативное торможение, однако оно реализуется лишь при
; gt; скоростях, превышаю-
- щих скорость идеального холостого хода. Механические характеристики в разных режимах показаны на рис. 2.1Q. / квад-
ранту соответствует двигательный режим, - режимы рекуперативного тррможения, динамического торможения и торможения противовключением при том же направлении вращения, Что и в двигательном режиме. IV квадранту отвечают те же режимы, что и И, но только для противоположного направления вращения по отношению к двигательному. .На этом рисунке прямые а я а - естественные характеристики, я прямые б и в - искусственные при введенных в цепь якоря Гдобавочных сопротивлениях в режиме противовключения (б) и динамического торможения (в). Для режима противовключения знак приложенного напряжения в уравнении (2.45) меняется на обратный, ему соответствует участок (б). Прямая б параллельна прямой б и проходит на одинаковом с ней расстоянии от начала координат. Для режима динамического торможения и=0 и уравнение механической характеристики примет вид
--Е;- (2.51)
Эта характеристика проходит через начало координат с уменьшающейся жесткостью при увеличении сопротивления Цепи якоря. .
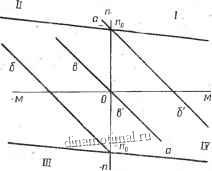
Рис. 2.19. Механические характеристики машины с независимым возбуждением в двигательном и тормозных режимах
Характеристики двигателей в процессе их эксплуатации могут отличаться От естественных характеристик вследствие изменения напряжения источника постоянного тока и падения напряжения соединительных проводах. Здесь следует различать двигатели независимого возбуждения от двигателей с параллельным возбуждением.
В двигателях с независимым возбуждением (/в =const) характеристики без учета реакции якоря при постоянном сопротивлении цепи якоря (включая сопротивления соединительных проводов), но при разных величинах напряжения питания аналогичны искусственным характеристикам, изображенным на рис. 2.17,6).
У двигателей параллельного возбуждения ток возбуждения и магнитный поток зависят от напряжения и тока якоря:
/в--=
а-в + Гд
(2.52)
С увеличением нагрузки на валу двигателя, якорь которого соединен с сетью проводами значительного сопротивления Гд, ток возбуждения й магнитный поток снижаются, а скорость вращения падает сильнее, чем в нормальных условиях (ркс. 2.20,а). Вращающий момент при /г=0, как это вытекает из (2.46), оказывается меньшим, чем при Гд=0. На рис. 2.20,6
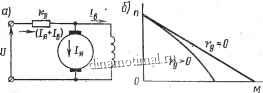
Рис. 2.20. Двигатель параллельного возбуждения;
а) схема; б) эксплуатацисняые характери-стики
показана эксплуатационная характеристика двигателя с параллельным возбуждением при наличии значительного сопротивления соединительных проводов. Если изменяется напряжение в сети и, то при малом сопротивлении соединительных проводов искусственная характеристика такого двигателя близка к естественной вследствие того, что одновременно с напряжением пропорционально ему снижается ток возбуждения.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [ 17 ] 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




