 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 [ 8 ] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
Таблица 2.3. Характеристики двигателей с дробными обмотками
Параметр
п , об/мин М Н-м Ри Вт р., Вт М , Н-м Pu .. Вт
gt;1
С05ф llCOSf
Двухфазные двигатели
1/3 166,7 0,31 74 5,55 0,232 70 4 0,05 0,7 0,04
, 15 2/5 200
0,334 57 7
0,223 54 4,7
0,08
0,052
214 0,476
68,5 10,7 0,358
63,5 8
0,12 0,86 1 0,108
Трехфазные двигатели
6/13 | 6/11 | ||
0,47 | 0,49 | 0,353 | 0,216 |
68,5 | |||
11,2 | |||
0,353 | 0,369 | 0,265 | 0,164 |
10,5 | |||
0,15 | 0,14 | 0,12 | |
0,82 | 0,85 | 0,62 | 0,87 |
0,13 | 0,121 | 0,079 | 0,061 |
7 4/7 428,6 0,57 80 25 0,426 67 19,5 0,29 0,82 0,24
(2.10)
Если число пазов выбирается из равенства
Zp = Z, = 2р,
то ротор будет вращаться против поля статора с частотой вра щения Ир = f/p.
Опыт проектирования подобного типа двигателей показывает, что энергетические показатели лучше у двигателей с числом зубцов ротора по (2.10). Однако при этом невозможно применение пусковой обмотки на роторе. Для обеспечения в этом случае надежного самозапуска без специальных пусковых устройств допустимое значение момента инерции не должно превышать величину
lt;гдоп lt;Лтах2р/ш, (2.11)
где М - максимальный синхронный момент. Двигатели с меньшей полюсностью обмотки статора и укороченным шагом имеют более высокие показатели.
В табл. 2.4 приведены данные некоторых макетных образцов, изготовленных в лаборатории электрических микромашин ЛПЛ им. М. И. Калинина на базе двигателей типа ДВА. Лучшим raquo;! эксплуатационными характеристиками с этими габаритными размерами обладает двигатель ССРД-5.
Из-за простоты конструкции и свойства развивать тормозной момент в неподвижном состоянии при питании обмоток статор ! постоянным током субсинхронные двигатели могут найти приме нение в различных схемах тихоходного и маломощного электро привода при частотном управлении.
Индукторные двигатели могут выполняться в двух основнЫ вариантах: одноименнополюсными, в которых поток возбуждение проходит в плоскости, параллельной оси вала, и разноименно полюсными, в которых поток возбуждения проходит в плоскост перпендикулярной оси вала. Частота вращения ротора тихохо? ных безредукторных двигателей п = f/z. 44
Таблица 2.4. Опытные данные макетных образцов синхронных тихоходных безредукторных реактивных двигателей при частоте 50 Гц
Параметр | ССРД-1 | ССРД-2 | ССРД-5 | ССРД-6 |
Яр, об/мин | 187,5 | |||
0,225 | 0,44 | 2,0000 | ||
Р Вт | ||||
Р2, Вт | 4,35 | 61,5 | ||
0,0557 | 0,157 | 0,243 | 0 345 | |
С05ф | 0,62 | 0,74 | 0,64 | 0,84 |
Примечание. Двигатели ССРД-1 и ССРД-2 имеют воздушный зазор 6= 0,35 мм, двигатели ССРД-5 и ССРД-6 6 = 0,18 мм.
Поток возбуждения разно именно полюс ных машин с радиальным возбуждением создается обмоткой возбуждения, расположенной либо в специальных пазах статора, либо в одних пазах с обмоткой якоря.
Обмотка возбуждения может быть как сосредоточенной, так и распределенной. Число пазов статора и ротора Zp и число пар полюсов обмотки статора р и обмотки возбуждения Pf связаны между собой зависимостью
= 2, plusmn; А plusmn; Pf.
(2.12)
Во избежание трансформаторной связи между обмоткой статора и обмоткой возбуждения число пар полюсов этих обмоток должно различаться в четное число раз, т. е.
р, = 2А:р или Pf = 2Кр К = 1,2,3. (2.13)
Перспективными являются двухзубцовые обмотки, предложенные Г. И. Штурманом и Н. Н. Левиным [104]. В лаборатории электрических машин Л ПИ им. М. И. Калинина были изготовлены на базе двигателей типа ДВА (z = 24) макетные образцы разно-именнополюсных индукторных двигателей с пульсирующим потоком с двухзубцовыми и с распределенными обмотками якоря. Все двигатели имели трехфазную обмотку статора и однофазную. обмотку возбуждения. Основные результаты опытного исследования этих двигателей приведены в табл. 2.5.
Конструктивные решения, разбираемые в настоящем параграфе, относятся к специальным случаям, где массогабаритные или энергетические показатели не являются определяющими.
Во многих случаях применение безредукторного электропри-?рда резко повышает основное качество устройства в целом.
ак, в частности, обстоит дело с приводом кассетных магнитофонов, электропроигрывателей и аналогичных устройств, где при-
ение редуктора вызывает laquo;плавание raquo; и пульсацию звука, а
Таблица 2.5. Опытные данные макетных образцов синхронных тихоходны;! двигателей с радиальным возбуждением при частоте 50 Гц
Параметр | СИД-1 | СИД-2 | СиД-3 | СИД-4 | СИД-5 |
0,16 | 0,17 | 0,61 | 0,58 | 0,55 | |
Pi, Вт | 42,4 | ||||
Р2, Вт | 11,8 | ||||
Лр, об/мин | 187,5 | 187,5 | |||
0,12 | 0,04 | 0,18 | 0,087 | 0,! 35 | |
С08ф | 0,79 | 0,83 | 0,55 | 0,45 | |
Т)С05ф | 0,095 | 0,033 | 0,099 | 0,035 | 0,054 |
также практически неустранимую вибрацию различных деталей аппарата.
Японская фирма laquo;Мацусита электрик raquo; демонстрировала на выставке laquo;Электро-77 raquo; в Москве выпускаемые ею для таких аппаратов электродвигатели для безредукторного привода.
К устройствам, где требования точности являются определяющими, относится и широкий класс информационных машин, таких, например, как сельсины. В двухотсчетной системе сельсинов, где в свое время применялся механический редуктор между осями сельсинов грубого и точного отсчетов, в настоящее время приме няется для грубого отсчета двухполюсный, а для точного - безредукторный многополюсный, например 64-полюсный, сельсины
В последние годы предложены бесконтактные сельсины, при которых обе машины совмещены в одну, имеют общий магнитный поток, одну и ту же обмотку возбуждения. В качестве основы одной из таких конструкций был выбран бесконтактный сельсин, рассмотренный в [70], имеющий безобмоточный ротор, состоящий из трех частей, и статор, составленный из трех ак сиально разнесенных пакетов, крайние из которых соединены внешним магнитопроводом. В кольцевом зазоре, образованном внешним магнитопроводом и средними пакетами статора, расположена обмотка возбуждения. На статоре расположена и обмотка синхронизации, выполненная общей для всех пакетов.
Для использования такого сельсина в двухотсчетной системе дистанционной передачи средняя часть ротора выполнена многополюсной и состоит из аксиальных пакетов, образующих две когтеобразные системы, каждая из которых через магнитопровод дящее кольцо связана с соответствующей двухполюсной крайней частью ротора, а на статоре имеются две обмотки синхронизации, одна из которых выполнена из двух частей, расположенны* на крайних пакетах статора, а вторая, многополюсная, располо жена на среднем пакете статора.
На рис. 2.9 изображен продольный разрез бесконтактного сельсина. Сельсин содержит безобмоточный ротор, состоящий и 46
Рис. 2.9. Безредукторный двухотсчетный бесконтактный сельсин
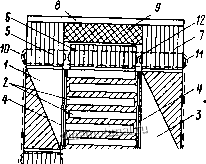
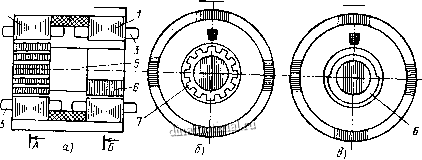
Рис. 2.10. Одноименнополюсный бесконтактный сельсин
трех частей 1, 2, J. Крайние части /, 3 ротора выполнены двухполюсными, а средняя многополюсная часть состоит из магнито-проводящих пакетов, образующих две когтеобразные системы, каждая из которых через магнитопроводящие кольца 4 связана с соответствующей крайней частью ротора. Статор сельсина выполнен в виде трех аксиально разнесенных пакетов 5, 6, 7, крайние из которых (пакеты 5, 7) объединены внешним магнитопроводом 8. В кольцевом промежутке, образованном средним пакетом 6 статора и внешним магнитопроводом расположена обмотка возбуждения 9. На статоре имеется обмотка синхронизации, выполненная в виде двухполюсных обмоток 10 и , расположенных на крайних пакетах статора, и многополюсной обмотки 12, расположенной на среднем пакете статора.
Определенные достоинства имеет и одноименнополюсная Система такого сельсина [70]. Статор сельсина составлен из двух аксиально разнесенных пакетов, соединенных между собой общим Магнитопроводом. Между пакетами находится обмотка возбуждения, и обмотки синхронизации расположены на каждом пакете
статора. На одном конце безобмоточного цилиндрического ротора установлен полюсный башмак, занимающий часть окружности ротора, другой конец ротора выполнен зубчатым.
На рис. 2.19, а представлен бесконтактный сельсин (а -, продольный разрез, б - сечение А-А, в - сечение Б~Б).
Сельсин содержит статор, состоящий из двух аксиально раз-несенных пакетов 1 (рис. 2.10), соединенных внешним магнито-проводом 2. На каждом из пакетов статора размещена обмотка синхронизации 3, а в промежутке между пакетами / и магнито-проводом 2 расположена обмотка возбуждения 4. В безобмоточ-ном роторе 5 с одного конца установлен полюсный башмак б, а другая часть ротора выполнена многозубчатой с зубцами 7. Обмотка синхронизации пакета статора, расположенного над многозубчатой частью ротора, имеет в 2 раза большее число полюсов по сравнению зубчатой частью. Обмотка синхронизации j, размещенная на пакете / статора, расположенным над полюсным башмаком 6, выполнена двухполюсной.
Безредукторные конструкции информационных машин могут оказаться не менее интересными, чем конструкции силовых машин.
Приведенные выше разработки в этой области относятся к машинам с безобмоточным ротором, прототипом которых является известный бесконтактный сельсин ВЭИ (БС ВЭИ). Выполнение машины с большим числом полюсов для другого типа бесконтактного сельсина с роторной обмоткой, питаемой через кольцевой трансформатор, весьма затруднительно. Представляется целесообразным в связи с этим остановиться на сравнении надежносп и быстродействия (в индикаторной схеме) этих двух принципиальных конструкций. Нужно отметить, что основное достоинстве бесконтактных сельсинов - повышение их надежности - дости гается не столько путем ликвидации контактного перехода щетка -кольцо, сколько путем устранения обмотки (чаще всего распреде ленной обмотки) на роторе. Известно, что, например, у коллекторных машин 75-80% отказов возникает из-за распределенное обмотки (якоря, компенсационной обмотки), 7-8% из-за со средоточенной обмотки полюсов и около 11% из-за коллекторно-щеточного узла [96]. У сельсина-датчика, сельсина-трансформа тора, вращающихся трансформаторов условия работы щеточноП контакта обычно лучше, чем у коллектора, и лишь у сельсинов-приемников индикаторной передачи они хуже из-за трудностей обеспечением значительного нажатия щеток на кольца.
У бесконтактных сельсинов с кольцевым трансформатором только сохраняется распределенная обмотка на роторе, но кроМ дополнительной сосредоточенной обмотки на статоре (она есть у БС ВЭИ) устанавливается еще одна дополнительная сосреД точенная обмотка на роторе.
Обработка рекламаций (обычно дающих заниженное чис
отказов - не все они оформляются рекламациями.) показала на-дичие 60 отказов на примерно 2-10 сельсино-часов эксплуатации бесконтактных сельсинов с кольцевым трансформатором, что дает интенсивность отказов порядка 3-10~* 1/ч (раза в 3 хуже, чем у gC ВЭИ [66]), причем треть отказов возникает в роторных обмотках бесконтактного сельсина с кольцевым трансформатором.
Тот факт, что при наличии обмотки на роторе удается получить несколько более высокую точность, вообще не имеет отношения к проблеме бесконтактности - самые точные вращающиеся трансформаторы, например ВТ-5, выпускаются с контактной системой.
Выше указывалось на особое значение устранения контактного перехода для сельсина-приемника индикаторной передачи. Но именно в этом случае особенно невыгодно применять ротор с обмотками, наличие которых увеличивает массу ротора. При этом необходимо иметь еще и увеличенный диаметр ротора. Все это в 2-3 раза увеличивает момент инерции и значительно снижает статическую и динамическую добротность приемника.
Повышение добротности может быть достигнуто увеличением синхронизирующего момента, но это при заданных габаритных размерах связано с повышением электромагнитных нагрузок, что всегда ведет к резкому снижению надежности.
Попытка заменить кольцевой трансформатор второй машиной, типа предложенной Е. Тирман, с распределенными обмотками на статоре и роторе 170] приводит к появлению вместо двух сосредоточенных обмоток кольцевого трансформатора двух распре- деленных обмоток, что может только еще больше снизить надежность машины.
Таким образом, представляется наиболее рациональным вьшол-нять безредукторную двухотсчетную сельсинную систему на базе прототипа БС ВЭИ, используя, например, предложенные в [70] и рассмотренные выше решения.
Большое значение имеет безредукторный электропривод для робототехники. В СССР освоен серийный выпуск роботов, в том числе роботов-манипуляторов на 14 движений - по 7 на каждую . laquo;руку raquo;, в [39] приводится кинематическая модель руки, имеющая
степеней свободы, а в [21] - таблица параметров движения элементов руки (табл. 2.6), иллюстрирующая необходимость высокого быстродействия таких роботов, которые имеют 7 степенен свободы, выполняя основные производственные функции руки в манипуляторе. У роботов-манипуляторов важным требованием является обеспечение ощущения оператором момента сопро-нвления производимой операции. Для этой цели часто применя-
называемые обратимые следящие системы, в большом ле случаев - сложная трансформаторная схема. ц СССР серийнно выпускаются электромеханические сельсин-манипуляторы МЭМ-5С и МЭМ-ЮС, полностью удовлетво-
-ills
| 1 2 3 4 5 6 7 [ 8 ] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




