 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 [ 5 ] 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
Тогда
2 л ш..
( 5 Р . (1 - Лшах) +
f (О (1 - Л ,ах)
vF=:4(Po.r + S gt;. (1.26)
где (f) не зависит от р /, Ропт не зависит от t. Минимизируем годовые потери по выражению
Отсюда
Так, при Р(0 = 1 имеем Г-Г = О, Р . = 1, Роп.= 1, что очевид-но. При любом другом постоянном значении p(0 = pi имеем Г - р2Г=0-, 1=- Ропт-Рь При ?,= t/T (равновероятная нагрузка)
r L(il = o; Г--=1; Po . = VV3 = 0,58.
При дискретном распределении имеем
r LXp,. = 0, или гХр.= laquo;
Ропт
Pom Ро
p =.ViPf,--
При заданном р , имеем заданное соотношение Ро и Р . ; сумма? ные годовые потери в меди составляют!, F, Р . , значит, можН сдвигом р , приблизить значение VZ pf F, к оптимальному. 26
Конструктор обычной электрической машины или трансформатора для обеспечения требуемого соотношения Ро/Р . варьирует отношение меди и стали в машине. У низкоскоростной машины безредукторного электропривода, как правило, нет возможности изменять (уменьшать), например, высоту спинки статора, чтобы увеличить потери Р( которые у таких машин много меньше потери р , так как этот раз.мер уже лимитируется конструктивными соображениями. Оптимизация соотношения потерь теряет смысл - возникает прямая задача минимизации потерь холостого хода (это уже в основном потери на возбуждение, на трение, на вентиляцию); оставляем на эти потери до 7% подведенной мощности. Рассмотрим частичный КПД = Pi/(Pi + PJ и будем считать общий КПД низкоскоростного двигателя ц = - 0,07.
Потери в меди, например, для двигателя постоянного тока
(1.27)
где - Огор-=--; Угор
удельное сопротивление материала в
нагретом состоянии машины; 4 - активная длина; 4, - длина лобовой части; S - сечение провода. Например, для меди 0гор~ я:;0,02 Ом-м / при обычных температурах нагрева; для алюминия Q p raquo;0,04 ОмМ /мм. Для оценочного расчета можно принять
л.ч = 1,5L и К р = бгорл.чм/пр,
гт = (L + /L 2,5.
При расчете учитываются только потери в меди, следовательно.
Е .BlvN/2a
Если учесть, что f = jS, то
/fc .,Qr.
(1.28)
Например, для В, = 0,6 Тл; v = 0,1 м/с; к, , = 2,5 и q, =
- Ом-м /мм для часто принимаемых / = 6А/мм т] =
- 0,06
Потери холостого хода АРо сравнительно невелики, но если ни все же составляют около 5-1% потребляемой мощности, полный КПД Т1=0,10,12. При v=0,25 м/с можно было бы получить л lt;0,33 и Ti; laquo;0,25.
Формулу (1.28) удобно представить [42] в виде
л-ч бгор
(1.29)
или, учитывая возможность варьирования как плотностью тока д так и значением средней индукции в зазоре В,
/Мр = -ЬД1 . (1.30,
Для меди с п, р = 0,02 Ом.м /мм и принятого отношения полной длины витка к длине его активной части 2,5 (отметим,
что этот коэффициент уменьшается с ростом числа полюсов и уменьшением частоты вращения машины) имеем весьма простое соотношение
В,р = 20у(1-.1.)/Па. (1.31)
Задавшись, например, для эскалатора метро, при v = 1 м/с вполне приемлемым КПД г)=0,8 (с учетом остальных потерь 11 = 0,73), получили бы ;75.р=5, т. е. при вполне достижимом у машины относительно небольшим зазором Вр=0,4 Тл для ~ 0,73-7-0,75 потребовалась бы плотность тока в обмотках 2 А/мм соответственно для алюминиевой обмотки Qrop ~0,04 Ом-м/мм и (1.31) примет вид
/7й ,= 10r(l-ri )/.L. (1.32)
Указанным параметрам для электродвигателя безредукторного привода эскалатора метро при этом соответствовала бы плотность тока в алюминиевой обмотке /= 1 А/мм. Еще одно последнее преобразование, и можно будет сделать существенный вывод в отно шении энергетических показателей низкоскоростных электродвига телей. Перепишем (1.32) в виде
Aj АВ
, л.ч Угор
или А] = Kv-г.
(1.33 (1.34
где К
--; Aj - фактор нагрева в его привычных, хотя
несколько отличающихся от предписанных системой СИ значения) (Л-в А/м, у-в А/мм ).
При одинаковых плотностях усилий на поверхности ротора одинаковом отношении активной части витка к его полной длине одном и том же материале обмотки и равном нагреве для сохране имя одного и того же значения КПД меньшим значениям линейно* скорости на поверхности якоря должны соответствовать во стольк же раз меньшие значения фактора нагрева.
На рис. 1.7 показана для нескольких значений КПД зависимосТ Л./[А(мм-.м)] от скорости у при удельном усилии, характерно raquo; для обычных машин, F=3-10 Н/м и на рис. 1.8 показаН
1000
то о
5МММ) 11а=0,В | ||||||||
Г/ 1 / | ||||||||
- | ||||||||
1 г Ъ Ч 5 в 1 v,n/c
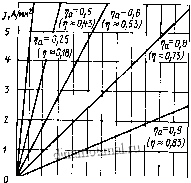
рис. I-7. Зависимость фактора нагрева от скорости, требующаяся для сохранения одного и того же значения КПД:
при f=3-I0 Н/м-;----при
/г=1.10Н/м
/23*557 89 10v,n/c Рис. 1.8. Зависимость плотности трка от скорости
зависимость плотности тока / (А/мм) при средней индукции Б зазоре Вр =0,4 Тл и F=l-10 Н/м, характерном для линейных машин. В обоих случаях предполагается медная обмотка и К1/к,.. У р=20.
Из рассмотрения выведенных формул и графиков видно, что у низкоскоростных машин для сохранения высокого КПД нужно увеличивать массу обмотки. Увеличение массы обмотки достаточно весомый фактор, который должен был бы снизить эффективность применения безредукторного электропривода либо из-за возрастания капитальных затрат (на обмотку), либо из-за роста эксплуатационных затрат при низком КПД.
Более детальное рассмотрение вопроса позволяет существенно смягчить этот вывод. Во-первых, меньший фактор нагрева или меньшая плотность тока приводит к меньшему фактическому нагреву обмотки. Это уменьшает значение у.р и увеличивает соответствующий заданному КПД при данной скорости фактор нагрева (плотность тока). Следовательно, уменьшается требуемая масса обмотки. Во-вторых, самым важным является то обстоятельство, что резкое снижение нагрева обмотки существенным образом повысит ее надежность и долговечность.
Известно из [65) и [96], что, например, в машинах постоянного тока доля отказов, возникающих в обмотке якоря, составляет около 80%, в коллекторе - около 11% и в остальных элементах только примерно 9%. При снижении температуры перегрева на 30 deg; С (что вполне реально даже при снижении плотности тока только вдвое) можно получить в 6-8 раз меньшую интенсивность отказов в обмотках. Можно также снизить интенсивность отказов коллекторного узла благодаря уменьшению скорости и
Учшения коммутации примерно вдвое, иал если считать, что у остальных элементов по причинам,
оженным в предыдущем параграфе, удвоится интенсивность
отказов (не считая тех отказов, которые возникают в редукторе) можно грубо оценить, что общая продолжительность безотказной
л 100
работы увеличится в sect;0/8 + 11/2 + 9-2 Р пР Р о в
раза. Если считать, что ущерб от отказа вызван только ценой заме няемого элемента (дополнительные составляющие ущерба - рас-ходы на рабочую силу, стоимость недоданной продукции за врем? восстановления и т. п.- примем равными остаточной стоимости отказавшего элемента - ведь и сгоревшая обмотка немало стоит. Тогда получаем, что в 3 раза реже заменяемая за значительно! время эксплуатации обмотка вдвое большей стоимости (соответ ственно удвоенному количеству проводникового материала) обхо дится народному хозяйству в 1,5 раза дешевле. Наконец, резко( снижение перегрева позволяет отказаться от зачастую громоздких испарительных и других охлаждающих систем, включаемых в cocrai электропривода и при использовании машин со значительным) плотностями токов в обмотках.
Конечно, приведенное сравнение никак не претендует на коли чественную точность - его задача показать, что, кроме повышени! КПД, снижение плотности тока у низкоскоростных машин имее! еще ряд положительных сторон.
Мы разбирали выше задачи сохранения высокого значени; КПД при меньшей скорости путем повышения массы обмоти В (94) указывается, что некоторые зарубежные фирмы уже иду! по этому пути. Но в действительности оптимальные решени этого вопроса, существенно выходящие за рамки оценки возмож ностей безредукторных приводов в этой книге, еще ждут совместны исследований электротехников и экономистов.
Повышение КПД у электропривода означает, что для выполне ния того же необходимого объема работы потребуется меньш электроэнергии, а это означает кроме уменьшения количеств устройств генерирования системы энергоснабжения еще и эквив-лентное уменьшение количества активных, в том числе проводш ковых, материалов у машин, вырабатывающих и преобразующи электроэнергию во всей указанной системе. Полный ответ и вопрос эффективности повышения КПД путем увеличения масс обмотки электродвигателя должен был бы, по-видимому, кро raquo; уже высказанных выше соображений, учесть и результаты тако! исследования. Пока же приходится ограничиться известными мет( дами расчета по приведенным расходам, где в соответствуют капитальных затратах должна быть учтена требуемая стоимос обмотки, а в состаш1яющей эксплуатационных расходов - потре ление энергии, зависящее от КПД. Наряду с этим заслуживают ос бого внимания машины, где задача получения высоких значен КПД при низких скоростях решается по-новому,- это маши двойного движения, рассматриваемые в гл. 4.
ГЛАВА 2
УСТРОЙСТВА С ЭЛЕКТРИЧЕСКОЙ РЕДУКЦИЕЙ
2.1. МНОГОПОЛЮСНЫЕ МАШИНЫ
Естественным способом снижения частоты вращения ротора электродвигателя является увеличение числа пар полюсов р. Действительно, при одной и той же частоте / питающего напряжения синхронная частота вращения машин переменного тока
л=60 /7. (2.1)
У двигателя постоянного тока, например, при параллельном или независимом возбуждении частота вращения холостого хода
п=-=-= -, (2.2)
т. е. при заданном напряжении U, числе пар параллельных ветвей а, числе проводов N и магнитном потоке () частота вращения ротора обратно пропорциональна числу пар полюсов р. Снижение быстроходности двигателей, как уже указывалось выше, ухудшает их массогабаритные и энергетические показатели. Однако стремление уменьшить передаточное число редуктора или (в отдельных случаях) полностью его исключить привело к тому, что в практике электромашиностроения имеет место довольно широкий набор машин с различными значениями номинальной частоты вращения ротора. Большой диапазон частот вращения и наименьшее их значение у серийно выпускаемых машин для промышленного электропривода имеет место у двигателей постоянного тока. Это положение можно проиллюстрировать табл. 2.1, где /г = 32 об/мин и laquo;max=1000 об/мин. Приведены данные по двигателям одного и того же типа и близких значений мощностей. В целом, диапазон частот вращения машин постоянного тока еще шире - до десятков тысяч оборотов в минуту. Синхронная машина, чтобы при промышленной частоте иметь частоту вращения 30 об/м, должна иметь 200 полюсов.
Таблица 2.1. Двигатели постоянного тока
Тип дви.ателя
МП4000-32У4 МПЬ300-63У4
МП11000-315У4
пп-юоомз
об/мин | кпд, | Момент инерции, кг-м | кН-м | Масса, т | т, кг/кВт | т (к Н-м) | |||
4000 6300 7100 1000 1000 | 930 930 930 440 600 | 32 63 125 315 1000 | 90 94 95,4 94,4 | 60-10 42,5.10 424- W 0,45-10 115 | 1190,5 951,7 537,9 30,3 9,5 | 190 182 111,8 13 6,25 | 47.5 28,9 15,75 13,0 6,25 | 159,6 191,3 207,9 | 0,17 0,30 1,04 0,49 1.27 |
| 1 2 3 4 [ 5 ] 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




