 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 [ 33 ] 34 35
рактеристику для полного цикла движения (пунктирная линия). Движение начинается, например, в точке а с половинным пусковым моментом (соответственно половинному перекрытию); затем доля используемого момента номинальной характеристики I возрастает и в точке А движение продолжается с постоянной скоростью и номинальным моментом, соответствующим данному скольжению (перекрытие - полное). При достижении точки переключения (концевой выключатель, установленный в точке соответственно приведенному выше расчету и рис. 4.18, б) характеристика переходит в точку В, где некоторое время идет движение с той же скоростью, затем переходит к точке остановки Ь (и соответственно меньшему перекрытию - с моментом, меньшим номинального). Затем движение совершается в обратном направлении с нарастанием использования номинального момента соответственно нарастанию перекрытия; в точке С движение продолжается в обратном направлении с постоянной скоростью и полным использованием номинального момента (полное перекрытие), по достижении точки переключения (и отработки сигнала переключения) характеристика переходит в точку D, оттуда - в точку а, завершая цикл. Выбором точки скольжения s , при котором имеет место максимальный момент, можно получить практически постоянное значение действующего момента или обеспечить близость его кривой к соотношению перекрытий, что позволяет воспользоваться результатами приведенного выше расчета.
Решающим фактором при использовании вращающегося обмотанного ротора, если применить конструкцию МДД по рис. 4.20, являются энергия, необходимая для частых реверсов этого достаточно массивного ротора, и затруднения в обеспечении необходимой частоты циклов. Это показывает проведенный Уфимским СКВ Миннефтепрома расчет мощности, потребляемой электроприводом на принципе двойного движения (например, применительно к условиям работы на станке-качалке).
Исходные данные для расчета:
электропривод двойного движения работает по принципу ассинхронио! двигателя и имеет на наружной поверхности ротора и внутренней поверхнос статора винтовую нарезку с одинаковым шагом;
расчет привода для станка-качалки ведем при использовании в машине движ ния статорных пластин от серийного двигателя с фазным ротором (напри! АК82-8);
наружный диаметр ротора 300 мм;
шаг нарезки винтовой линии .S=30 мм;
ширина канавки винтовой линии 6=7,5 мм;
глубина нарезки винтовой линии С=3 мм;
напряжение питающей сети 380/220 В, /=50 Гц;
ход ползуна электропривода 0,75 м;
балансир станка-качалки совершает 15 качаний в минуту, следовательно, за это время совершает 15 движений вверх и 15 движений вниз; 192
скорость движения ползуна 0,375 м/с;
режим работы - с частными реверсами при электрическом торможении (57) по ГОСТ 183-74;
коэффициент полезного действия 0,6;
передаточное число привода станка-качалки ЗСКЗ-0,75-400 го=95; максимальная мощность электродвигателя, применяемого на стайке ЗСКЗ-07-400 4,5 кВт;
номинальная частота вращения 1440 об/мин.
Расчет ведем из предположения, что двигатель стаика-качалки мощно) 4,5 кВт создает усилие в точке подвеса шатунов к балансиру станка-качалки совершения полезной работы по подъему жидкости из скважины.
I. Номинальный момент на валу двигателя
мощностью для
М. = 9550- =
9550-4,5 1440
-=29,8 Н-м.
2. Момент на тихоходном валу редуктора
где т1 - КПД передачи от двигателя к балансиру, т) laquo; 0,8.
= 29,8 95 0,8 = 2265 Н м.
3. Тангенциальная сила в точке подвеса шатунов
где г - радиус кривошипа станка-качалки ЗСКЗ-0,75-400, г = 144 Т = 2265/0,144= 15-,73 кН.
4. Поскольку в электроприводе двойного движения заложен принцип винтовой передачи, необходимо рассчитать момент на роторе электропривода для преодоления усилия Т = 15,73 кН: М = Ttg р, где S = 0,03 м - шаг винтовой нарезки; ) - дяаметр ротора; tg р = 5/я1 gt; = 0,03/(ЗЛ4-0,3) = 0,032. М = 15,73-0,15-0,032 = 0,075 Н-м.
5. Определяем частоту вращения ротора из расчета средней скорости движения ползуна электропривода v = 0,375 м/с:
0,375 0,03
60 = 750 об/мин. 6. Мощность, затрачиваемая на винт laquo; электропривода.
Л/л 7,5-750
~ - 5,9 кВт.
р 9550 расходуемая
9550
на выполнение механической работы
Это мощность, I жного насоса.
7. Номинальная мощность электропривода
Рном = Р/ц = 5,9/0,6 = 9,8 кВт.
8. Определяем номинальный ток электропривода:
погру-
9,8 - 10
л/Зг/сохф V3-380.0,8
= 17А.
13-3118
9. Пусковой ток электропривода определяем, принимая кратность пуско-j вых Токов, равную 7:
17-7= 119 А.
10. Для определения перегрузочной способности электропривода необходимо! рассчитать время пуска и торможения. Принимаем за номинальный момент! на роторе электропривода момент, развиваемый им на винте и равный 75 Н-м.И
П. Принимаем пусковой момент М = = 105 Н-м.
12. Принимаем максимальный момент Мах = 2М о = 150 Н-м.
13. Средний пусковой момент электропривода
М .,р = (М + М )/2 = (105 + 150)/2 = 127,5 Н-м.
14. Для быстрой остановки ротора используем торможение противовключе-1 нием и средний тормозной момент
= 0,9М = 0,9-105 = 94,5 Н-м.
15. Суммарный запас кинетической энергии в поступательно движущихся -J массах рабочего органа (штанги, балансир противовеса)
W =i!!=i Z?JLMZi=nO кг-м1 22
16. Суммарный момент инерции (при /дв = 2,2 кг-м)
= 1,25/дз + = 1,25-2,2 + -gllO = 2,75 + 0,04 =
= 2,79 кг-м1 J
17. Среднее ускорение при пуске определяем из формулы М = - jj ,
где М - момент, развиваемый двигателем (в нашем случае М ,р); М, - статический момент нагрузки (в нашем случае он равен нулю); а - ускорение вала привода,.
W cp 9,55-127,5 об/мин
а = 9,55--- =---Л-
18. Время пуска
~ 2,79
п 750 а~ 435
= 1,7 с.
19. Ускорение вала привода при торможении определяется по формуле
а = 9,55-
г.ср + 9,55-94,5 905 /мин
2,79
2,79
20. Время торможения
По условиям работы станка-качалки рабочий ход насоса совершается (при числе качаний балансира 15 качаний в минуту) за 2 с. Вариант по рис. 4.1 не обеспечивает требуемой частоты циклов качалки. Легко показать, что у него и существенно большее, чем у штатного привода, потребление энергии, т. е.
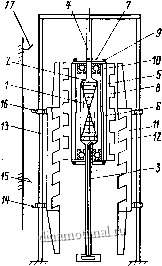
большие эксплуатационные расходы, существенно перекрывающие экономию, связанную с эксплуатацией маслозаполненного редуктора и всей относительно сложной кинематической схемы. Выходом является применение МДД по рис. 4.21, где массивный обмоточный ротор неподвижен и реверсируется лишь промежуточный ротор, имеющий на порядок меньший момент инерции. На рис. 4.21 приняты обозначения: / - внутренний неподвижный статор; 2 - его многофазная обмотка; 3 - полый вал-стойка, внутри которой размещены подводящие провода; 4 - второй вал-стойка; 5 - пакет полого цилиндрического ротора; 6 - стержни короткозамкнутого ротора обмотки; 7 - замыкающие кольца обмотки ротора; 8 - винтовая нарезка на наружной части ротора; 9 - опорно-осевые подшипники, на которых вращается ротор; 10 - зубцы пакета полого ротора 5; и - наружный статор; /2 - его внутренняя винтовая нарезка; 13 - направляющие, препятствующие вращению статора , но обеспечивающие ему возможность поступательного перемещения; 14 - выступ на статоре, включающий концевой переключатель 15 при движении вниз; 16 - выступ на статоре, включающий концевой переключатель 17 при движении вверх.
Машина работает следующим образом. При подаче многофазного напряжения к зажимам 18 токи в обмотке 2 создадут вращающийся магнитный поток, проходящий по пути: внутренний неподвижный статор /, внутренний воздушный зазор, зубцы 10 полого цилиндрического ротора 5, их выступы винтовой нарезки 8, внешний воздушный зазор, выступы винтовой нарезки 12 наружного статора, спинка статора , снова выступы винтовой нарезки 12, снова внешний воздушный зазор, выступы винтовой нарезки 8, зубцы 10 ротора 5, снова внутренний воздушный зазор и, замыкая путь, снова внутренний неподвижный статор /.
Взаимодействие вращающегося потока, создаваемого обмоткой 2 с токами в короткозамкнутой клетке, образуемой стержнями б и замыкающими кольцами 7, приводит во вращение ротор 5. При этом возникает изменение магнитной энергии W во внешнем воздушном зазоре между выступами винтовых нарезок 8 (ротора 5) и /2 и появляется усилие, пропорциональное dW/dl. Где / - относительное смещение упомянутых выступов. Поскольку ротор 5 вдоль своей оси перемещаться не может из-за наличия опорно-осевых подшипников 9, под воздействием указанного усилия начинает перемещаться наружный статор вдоль направляющих 13. Остановка или изменение направления движения осуществляется воздействием выступов статора 14 или 16 на концевые выключатели 15 ил raquo; 17 соответственно.
Рис. 4.21. Схема привода с переменным перекрытием и промежуточным ротором с малым моментом инерции
Существенным достоинством машины по данному варианту является наряду с повышенной надежностью благодаря полному отсутствию каких-либо контактных переходов, изгибающихся кабелей и т. п. еще и высокое быстродействие. Разгону, торможению, изменению направления движения противодействуют лишь малый момент инерции цилиндрического полого ротора .5 и масса полностью безобмоточного наружного статора , достигающего при движении лишь отно raquo;-сительно небольших скоростей. f
Для обеспечения заданного графика усилий при движении может быт использовано неполное перекрытие винтовых нарезок 8 и 12.
Для примера, разобранного выше, примем эквивалентный радиус инерции промежуточного ротора R = 0,16 м; масса промежуточного ротора т = уя D Ы, где у - эквивалентная удельная плотность, 7= 4,0-Ю кг/м; 0 = 0,35 м; ширина кольца 6= 0,012 м; /= Я = 0,75/2 = 0,375 м; m = 17,5 кг. Тогда = mR-* = 17,5-0,16- = 0,45 кг-м*.
При том же значении И имеем суммарный момент инерции = 1,25-0,045 -- 0,04 л; 0,6 кг-м. Это почти в 5 раз меньше, чем в предыдущем расчете в п. 16.
Оставляя в первом приближении остальные данные неизменными, имеем ускорение вала привода а = 20.30 (об/мин)/с; время пуска / = 0,37 с; ускорение вала привода при торможении а = 1508 (об/мин)/с; время торможени /, = 0,5 с.
Даже при времени рабочего хода насоса 2 с (15 качаний в минуту) им ем еще отрезок времени / gt; 1 с для движения с постоянной скоростью ответственно рассмотренным выше графикам. Соответственно снижается и требление энергии - система становится конкурентоспособной с штатным приводом качалки.
Особое значение приобретает быстродействие, достигаемое МДД с промежуточным ротором (рис. 4.21) для роботов, где требуется чаще всего ограниченное поступательное движение с наименьшим значением постоянной электромеханической времени Т = v/a :
V тг
т ту
Рассмотренные выше экспериментальные данные для МДД с поступательно движущимся статором (явно уступающий в быстродействии МДД с промежуточным ротором и медленным движением относительно короткого замыкающего магнитопровода по рис. 4.21) дают значение постоянной времени Т - v/u = 0,29/58 = 0,005 с. Можно ожидать, что у привода робота при скоростях v lt;0,2 м/с и использовании МДД с промежуточным ротором постоянная времени не превысит значения 0,003 с; напомним, что постоянная времени специально отработанных для таких задач приводов фирмы Inland больше в 5-10 раз (см. табл. 2.2); у низкоско-росгных двигателей постоянного тока больше в 50-100 рэз (см. табл. 2.1).
Использование МДД с промежуточным ротором может стать основой и для привода, создающего неограниченное поступательное движение экипажа относительно лотка или трубы со спиральной нарезкой. При этом в токовой цепи полностью отсутствуют контактные переходы (щетка - коллектор; щетки - кольца ИТ. п.), необходимые в разобранном выше варианте.
В качестве базовой может быть выбрана любая размещенная на экипаже машина переменного тока - асинхронная (с промежуточным ротором по рис. 4.6, г) или синхронная (рис. 4.22, а) с внутренним статором / и промежуточным ротором в виде дуговых постоянных магнитов 2 (рис. 4.22, а - в), у которых внутренняя поверхность гладкая, а на наружной поверхности имеется спиральная нарезка, взаимодействующая со спиральной нарезкой замыкающего магнитопровода 3 - лотка или трубы, закрепленных на пути.
При использовании машины постоянного тока в качестве базовой необходимость в контактном переходе остается: щетки, связанные с промежуточным ротором, скользят по поверхности неподвижного коллектора и имеется контактный переход от неподвижных щеток к кольцам для подачи тока к указанным вращающимся щеткам. На рис. 4.22 схематично показаны направляющие 4, позволяющие экипажу 5 скользить вдоль грубы (или лотка) по соответствующим выемкам или рельсам. Если
- VZ/J/ - | |||

Рис. 4.22. Привод поступательного движения с промежуточным ротором: а - из постоянных магнитов; б, в - с ферромагнитным промежуточным ротором
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 [ 33 ] 34 35 |




