 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 [ 29 ] 30 31 32 33 34 35
большем перемещении руки, чем груза. И, наоборот, малое, мощное перемещение (например, при тепловом расширении) может вызвать метровые перемещения. Если нужно при этоц иметь вращающийся элемент а качестве приводящего или прц. водимого в движение, это можно выполнить по схеме на рис. 4 13 в, г (3).
При выполнении сцепления винта / и гайки или ряда гаек 2 электромагнитным способом схема по рис. 4.13, г приобретает все качества управления скоростью (частотой вращения) и pg. версом, что и описанные выше устройства.
Важной задачей является создание электромеханической передачи, способной преобразовывать возвратно-поступательное движение в неограниченное однонаправленное вращательное движение (например, от поршней двигателя внутреннего сгорания непосредственно к рабочему валу или сколь угодно длинной полосе) и, наоборот, однонаправленное вращение - в возвратно-поступательное движение, например, от вала электродвигателя к штангам станка-качалки. При совмещении обеих функций можно осуществлять передачи вращения со значительным изменением скоростей - = -tl при неограниченном одно-
направленном вращении [72], [83], [88].
Описанная в sect; 4.1 система линейного электропривода с электромагнитным винтовым сцеплением является лишь одним из вариантов частичного решения задачи, не охватывающего возвратно-поступательное движение; другой вариант приводится в конце настоящего параграфа. Более полное решение задачи преобразования возвратно-поступательного движения в неограниченное вращательное показано на рис. 4.14, ж, з.
На этих рисунках приняты следующие обозначения: / - основание; 2 - левая стойка; 3 - ведущий вал; 4 - ei о подаип-ники; 5 - направляющие; 6 - элемент с возвратно-поступательным движением (дуга гайки); 7 - его левый внутренний нарезанный участок - выступ; 8 - нарезка выступа, например, левоходовая, показана пунктирной линией на рис. 4.14, г; 9 - правый внутренний выступ элемента 6; 10 - его нарезка (пра-воходовая, показана пунктиром на рис. 4.14, г); II - центральный выступ элемента 6 с отверстиями для прохождения направляющих 5; 12 - ведущее кольцо; 13-спицы колеса 12; Z крепежное кольцо; 15 - шпилька, скрепляющая кольца 14 и 1 с валом 3; 16 - левый нарезанный участок кольца 12; П его нарезка (левоходовая, показана сплошными линиями на рис. 4.14, г); 18-правый нарезанный участок кольца 12; 19 - его нарезка (правоходовая, показана сплошными линиями рисунках 4.12, г); 20 - левый внешний выступ элемента 6; его нарезка (левоходовая, показана пунктиром на рис. 4.14, 22 - правый внешний выступ элемента 6; 23 - его нарез
лравоходовая, показана пунктиром); 24 - наружное (ведомое) [ольцо; 25 - выводная муфта со спицами, соединенными с кольцом 24; 26 - внутренний подшипник муфты 25; 27 - выводной (ведомый) вал; 28 - правая стойка; 29 - подшипник вала 27 стойке 28; 30-левый выступ кольца 24; 31 - его нарезка (певоходовая, показана сплошными линиями на рис. 4.14, г); j2 - правый выступ кольца 24; 33 - его нарезка (правоходовая, оказана сплошными линиями на рис. 4.14, г); 34 - постоянный ,агнит; 35 - обмотка выступов 7 и 9 (полюсов); 36 - фигурная задняя стенка с вырезами, сквозь которые могут проходить выступы 9 и 22 элемента 6 (его выступы 7 а 20 могут соответст-нно проходить через вырезы стойки 2).
На рис. 4.14, а схематично показан продольный разрез устройства, причем идя того чтобы оттенить принципиально важные участки нарезки, попадающие в разрез остальные части устройства не заштрихованы. Показана только одна часть гайки (элемента 6) с возвратно-поступательным движением. Фактически ],1Я сбеспечения непрерывного движения наружного кольца 30 JX должно быть по крайней мере два комплекта, сдвинутых вдоль образующей кольца 30 и находящихся в каждый момент времени 1 разных фазах возвратно-поступательного движения: например, со сдвигом фаз на четверть полного цикла (как показано на РИС. 4.14, д). На рис. 4.14, б схематично показан поперечный зфез рабочей части устройства. Здесь также показаны штри-
овкой нарезки 8 и 17, 21 1л 31 не заштрихованы попадающие i разрез детали.
На рис. 4.14, в принципиальные части - кольцо 12 и элемент айки 6-показаны в аксонометрии. На рис. 4.14, г показана развернутая в плоскость поверхность соприкосновения нарезки ч 17 (на выступе 7 и участка 16 соответственно), 10 и 23 на выступе 9 и участке 22); слева - для обеспечения одина-лвой скорости движения в прямом и обратном направлениях чемента 6 при равномерном вращении кольца 12; справа-при мданном отношении этих скоростей. Верхний элемент 6 показан а этой развернутой поверхности в четырех последовательных воих положениях относительно кольца 12; при этом вместо пе-*мещения вверх вдоль рисунка поверхности кольца 12 показано движение вниз верхнего элемента 6; остальные два элемента 6 Казаны в одном положении 1. На рис. 4.14, д показаны развертка поверхности винта и под два независимых элемента гайки, каждый из которых связан, ример, с соответствующим поршнем двигателя внутреннего Тирания - их циклические движения сдвинуты по фазе, что и Ражено на рисунке.
На рис. 4.14, е показана модель варианта с механическим Плением, выполняющая преобразование вращательного дви-*Ния в возвратно-поступательное и последовательное преоб-
7 6 ZO Z1 30 51-11 Z3 Zl Z4
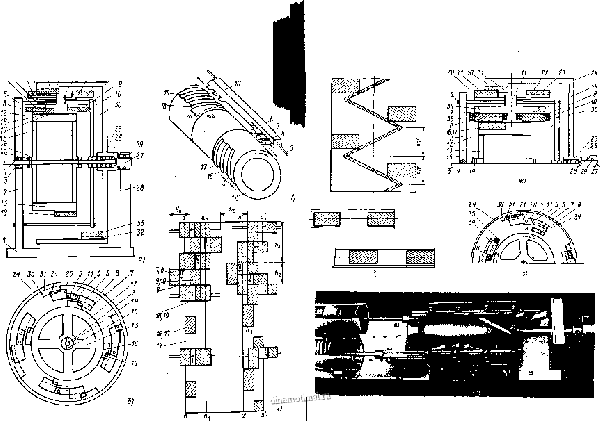
- Рис. 4.14. Преобразователь движения: 5. в, г, 3 - вариант с механической связью; е - фотография модели; ж, з - вариант с электромагнитной связью
разование возвратно-поступательного движения во вращательное.
На рис. 4.14, ж, 3 схематично изображены продольный (2) и поперечный (3) разрезы рабочей части устройства в электромеханическом варианте: построение аналогично рис. 4.14, а и б-Щл при выполнении внутреннего зацепления элемента 6 с кольцом /2 электромагнитным путем, для чего на одном из элементов предусмотрен постоянный магнит 34, а на другом также и под-магничивающая обмотка 35. Поверхность кольца 12 выполнена с невыступающими нарезанными участками 16 и 18.
Рассмотрим работу устройства в изображенном на рисунках наиболее сложном выполнении - для передачи неограниченного вращения вала 3 с угловой скоростью ю: ведомому валу 27 с угловой скоростью (х)2 = j- Д I-средний радиус нарезки 17 и Г2 - средний радиус нарезки 31. При повороте кольца 12 (которому соответствует перемещение, например, вверх из положения 1 на развернутой поверхности кольца 12 на рис. 4.14, г) левоходовая нарезка 17 участка 16, взаимодействуя с такой же нарезкой 8 выступа 7 элемента 6, заставляет его перемещаться влево, причем центральный выступ скользит вдоль направляющих 5. Это движение продолжается до тех пор, пока элемент 6, пройдя через положение , не придет в положение / и не выйдет из зацепления. На рис. 4.14, г, как уже указывалось, вместо перемещения вверх поверхности кольца 12 показано адекватное ему перемещение вниз элемента 6. На этом участке движения элемента 6 нарезка 10 выступа не сцеплена с нарезкой 19 кольца 12. Но при продолжении вращения в том же направлении кольца 12 правоходовая нарезка 19 его правого участка 18 вступит во взаимодействие с правоходовой нарезкой 10 правого выступа 9 элемента 6 и заставит его перемещаться вправо, через положение IV в положение /, когда выйдут из зацепления нарезки 19 и 10; цикл возвратно-поступательного движения завершился.
При этом можно задать требуемый режим возвратно-поступательного движения элемента 6 (и связанной с ним нагрузки, если его движение используется непосредственно на какую-либо нагрузку). Так, например, при возвратно-поступательном движении рабочей части строгального станка требуется повышенная скорость обратного хода. Она может быть обеспечена при выполнении выступов с нарезками (правая часть рис. 4.14, г - перемещение влево на величину /г raquo; совершается за время прохождения дуги Л:, а вправо на ту же величину ht, за время прохождения дуги hi с отношением линейных скоростей движения вправо 12 и движения влево V v/vi = hi/hi). Средние скорости возвратно-поступательного движения равны (левая часть рис. 4.14, г); выполнением выступа 7 и участка 16 и соответственно 9 и 18 может быть обеспечен заданный график колеба-
тельного движения элемента 6, например, по трапеции, достаточно близкой к синусоиде. Выполнением выступов 20 и 30, 22 и 32, помеченных на верхней части рисунка 4.14, г положениями / - IV, а также движущихся со сдвигом по фазе цикла колебания аналогичных внешних выступов элементов 6 можно задать в определенных пределах график вращения кольца 24, в частности, выполнить его равномерным.
Варианты механического сцепления, схематично показанные на рис. 4.14, а и б, и электромеханического сцепления по рис. 4.13, а а б различаются лишь использованием поверхности ведущего кольца 12 по передаваемому моменту. Они обладают достоинствами и недостатками соответствующих контактных и магнитных передач, но равно и превосходят их универсальностью, способностью преобразовывать все перечисленные выше виды движения с неограниченным диапазоном перемещения.
Следует указать, что показанное на рис. 4.14 взаимное расположение колец 12 и 24 не является единственно возможным; возможно их раздельное расположение, например, друг за другом (существенно лишь при этом разделить элемент 6 на два: один с выступами 7 и 9, сцепляющийся соответственно с участками 16 и 18 кольца 12, и второй, механически или с помощью синхронной связи связанный с первым, с выступами 20 и 22, сцепляющимися с выступами или нарезанными участками кольца 24).
При указанном на рисунках коаксиальном расположении колец возможно весьма компактное выполнение многократного преобразования скорости вращения, если установить, например, на внешней поверхности кольца 24 участка с нарезкой (вторые элементы гайки 6) и установить дополнительное внешнее кольцо. При трехкратном преобразовании можно иметь i порядка 7 -10 тыс. в весьма компактном устройстве.
На основе описанного преобразователя движения возможно следующее:
1. Непосредственно преобразовать вращательное движение в возвратно-поступательное, например, для привода станка-качалки в нефтедобыче, где сейчас для такого преобразования применяется ременно-клиновая передача, редуктор и шатунно-криво-шипный механизм. То же относится к электроприводу насосов, станков и других механизмов с возвратно-поступательным движением. При необходимости и здесь может быть применен laquo;силовой верньер raquo; по рис. 4.13.
2. Непосредственно преобразовывать, минуя коленчатый вал и в определенной степени редуктор, циклическое возвратно-поступательное движение, например, поршней двигателя внутреннего сгорания во вращательное движение, причем набор скоростей может осуществляться набором комплектов нарезок, приводимых в соприкосновение по выбору (подробнее ниже при рассмотрении рис. 4.15).
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 [ 29 ] 30 31 32 33 34 35 |




