 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [ 28 ] 29 30 31 32 33 34 35
резки 15, зазор, выступы нарезки 12, магнитопровод 10. Он вызывает при вращении полюсных наконечников 5 и И неограниченное поступательное перемещение объекта / вдоль трубы ]з Показанное на рис. 4.10 несимметричное расположение замыкателей потока позволяет осуществить и левитацию - полную или частичную компенсацию веса объекта на рис. 4.11. Для обеспечения перемещения экипажа 6 вне трубы, например вдоль рельсового пути, применен один замыкатель потока 5, с которым взаимодействуют полюсные наконечники /, вращаемые валом 7 в подшипниках 2; на этом рисунке кроме катушки возбуждения 3 изображен и вариант с постоянным магнитом.
Покажем, что при питании катушки возбуждения постоянным током с неизменной величиной МДС sK.A, где попе-
речное сечение окна катушки; К, - коэффициент заполнения катушки проводниковым материалом и / - плотность тока в катушке, доля МДС, приходящаяся на зазор, резко возрастает по мере смещения выступов относительно друг друга. Сложный характер зависимости проводимости зазора от взаимного смещения выступов и стальной части магнитной цепи от величины индукции в ней затрудняет аналитический вывод зависимости распределения МДС между частями магнитной цепи от указанного смещения выступов. Определенное упрощение анализа внесла примененная автором аппроксимация соответствующих кривых. Так, например, кривая зависимости проводимости зазора в функции относительного смещения выступов I = h/h при отношении шага нарезки /? к минимальному зазору /2 /б= 20 может быть удовлетворительно аппроксимирована косинусоидой G (Е,) = 0,7 + 0,3 cos 2.т[ё с погрешностью не более 8%, а зависимость напряженности поля в литой стали от индукции в ней В в диапазоне индукций В = (1 2,05) Тл функцией Н = = WiC-где Я - напряженность поля при индукции В = 1 Тл; отклонения от табличных данных при этом не пре-
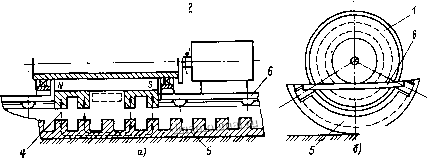
Рис. 4.11. Преобразователь движения: а - схематичный продольный разрез; б - схематичный поперечный разрез
ышают 4%. Пусть при полном перекрытии имеем индукцию J стали = 2 Тл, что при ширине выступа й равной половине шага нарезки й , соответствует средней индукции в зазоре % = 1 Тл. Примем, что имеющая при этом место наибольшая проводимость зазора соответствует приведенному зазору б = 1,5 мм (если воспользоваться известным соотношением для
Л +10Л
эквивалентного зазора б = б ,; + юб - это значение соответствует б , = 1 мм при /? = 20 б и = Л /2). Тогда при полном перекрытии имеем = 6200 А при эквивалентной тине стальной части магнитной цепи L = 0,2 м.
Рассмотрим рабочий режим при \ = h/h = 0,4 (перекрытие выступов равно 0,2). Тогда по аппроксимативной формуле проводимость зазора составит 0,457 от проводимости при полном
перекрытии, что приводит к бэкв =
1..500~ 0,457
= 3,28-10

Используя и аппроксимацию Н (Вет) gt; получаем в этой точке Вь- 1,825 Тл и Вст= 1,67 Тл с перераспределением неизменной МДС катушки F,= F,+ F = 4790 + 1410 = 6200 А; МДС зазора возросла почти в 4 раза, индукция - примерно в 1,8 раза относительно этих же параметров при полном перекрытии.
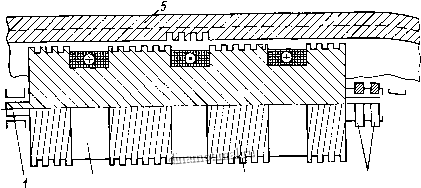
Если учесть некоторое снижение относительно максимума производной dG (l)/dl, которой пропорционально тяговое усилие, то все же получаемый эффект от работы в точке с меньшим перекрытием раза в 4 больше, чем при неизменном потоке, и удельное усилие F (10 Н- 15) -10* Н/м приведенного к полной площади рабочего зазора можно считать вполне реализуемым. Рабочий режим для принятых выше данных в точке Е = 0,25 (0,5 полного перекрытия) дает cos 2лЕ = О и sin2n=l; отношение G/G= 0,7 и неизменная МДС 6200 А обеспечивает h= 2330 А. Это в 2 раза больше, чем при полном перекрытии. Ненасыщенность магнитопровода в рабочих режимах позволяет гакже (при наличии запаса момента приводного двигателя) форсировать усилие при кратковременных нагрузках путем подачи ВДвышенного напряжения постоянного тока на катушку возбуждения. Существенное значение имеет металлоемкость протяженных элементов, располагаемых на пути, например, маг- laquo;итопроводящего лотка 5 (рис. 4.11). Для обеспечения сечения Ри прохождении магнитного потока, не меньшего чем сечение участка с выступами /, высота спинки магнитопроводящего лот- 3 5 должна быть примерно равна половине сечения всех выс-Упов участка (около 1/4 осевой длины участка). Для умень- ения этой величины требуется применить многокатушечную laquo;Многополюсную raquo;) систему, как это показано на рис. 4.12 ВДльца 4 здесь показаны условно - при наличии прорези в маг-Чтопроводе 5 и зазоре между стенками катушки 3 и вращающемся на оси / цилиндром с нарезкой 2 катушки могут быть
3 It
Рис. 4.12. Многополюсный преобразователь движения
неподвижно укреплены через указанную прорезь аналогично конструкции по рис. 4.10).
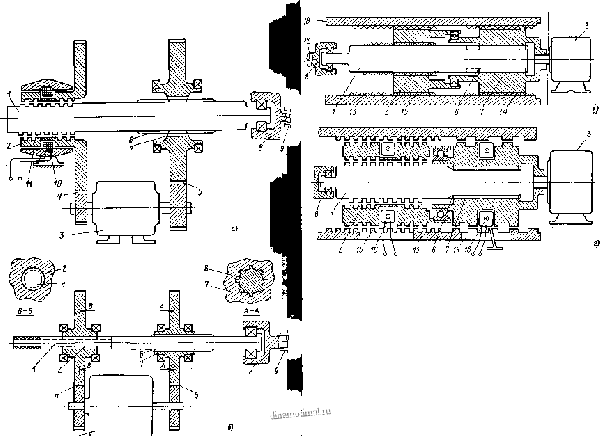
Высокое значение удельного усилия, отсутствие краевых эффектов, возможность выполнения многодвигательного привода при сколь угодно малых расстояниях между двигателями (в отличие, например, от линейных асинхронных двигателей, где эти расстояния велики) - технические преимущества рассматриваемой системы линейного привода, а использование обычных вращающихся электрических машин, организация производства лишь преобразователей движения, относительная дешевизна и простота в эксплуатации наиболее протяженной части - путевой структуры - преимущества экономические. При этом даже для относительно небольших скоростей поступательного движения например примерно 5 м/с, когда энергетический фактор ЛАД Т1 cos ср ж 0,1 0,15, можно использовать двигатели с г) С08ф gt; 0,7. При б= 1 мм и К= 20 мм получаем при л = 24 об/с (1440 об/мин) линейную скорость v = 24-0,02 = 4,8 м/с. Но при существенно более низких скоростях поступательного движения (например, 1,6-10- м/с, что характерно для электрических исполнительных механизмов МЭИ и аналогичных устройств) необходим многоступенчатый редуктор, значительно повышающий металлоемкость и снижающий КПД привода. Так, МЭП-1600, приводимый в движение двигателем в 160 Вт, имеет на выходе мощность 25 Вт, т. е. КПД передачи всего 16%, масса механизма 75 кг, удельная масса т= 3000 кг/кВт. При использовании рассматриваемого электромагнитного преобразователя, выполняющего и функции ограничителя усилия или момент . необходимого в таких механизмах, возможно применение опре деленного вида laquo;силового верньера raquo;, принципиальные констрУ тивные схемы которого изображены на рис. 4.13. Двигатель вращает через шестеренную пару 4 гайку 2, сцепленную (эле
ромагнитно на рис. 4.13, а и механически на рис. 4.13, б) с винном 1, выступы 6 которого проходят через выемки муфты 7, вращаемой двигателем 3 через шестеренную пару 5. Пусть, напри-,ер, пара 4 состоит из шестерен с zi i/zi2 = 50/150, а пара 5 с -)i/z22 = 49/151; скорость вращения гайки относительно винта будет Лл = ГЦ (50/150 - 49/151) = 8,8-10-= При h = 10 мм имеем v=8,8-10 - п\ об/с и требуемая скорость v=l,6 мм/с до-l-Q .стйгается при л, = 18 об/с (1090 об/мин); 6-полюсный двигатель I цожет обеспечивать в такой системе требуемую низкую скорость, -полюсный - около 1 мм/с. Для того чтобы выходной шток мог бы перемещаться в направляющих 9 без вращения, должен быть введен разделительный элемент 8.
В электромагнитном варианте можно обеспечить весьма быстрый реверс механизма, если установить дополнительную шестеренную пару, аналогичную паре 4 с гайкой 2, но создающую раз-ность скоростей вращения винта обратного знака (-Л/г). Тогда при переключении в стойке катушек 10 обеих гаек будет происходить реверс с малой постоянной времени - реверсируется только винт / (у механизма типа МЭО-1600, как показывают расчеты, можно получить постоянную времени Т 10 с - на два порядка меньше, чем у выпускаемых промышленностью механизмов) .
Вариантно, для получения малой разностной laquo;верньерной raquo; частоты вращения Ли, например, равной частоте скольжения асинхронного двигателя, можно гайку 2 вращать синхронным двигателем, а муфту 7 - асинхронным (или наоборот), подключив эти двигатели к одной и той же многофазной сети. Наиболее компактным решением для этого явилось бы использование двигателя с многофазным статором с двумя, смещенными друг от друга, механически не связанными роторами, на одном из которых, например, установлена короткозамкнутая обмотка, а на другом - система возбуждения постоянного потока. Один ротор надо механически связать с гайкой 2, а другой - с муфтой 7. При установке нескольких гаек с нарезками разного шага или при направлении и выполнении на противостоящих участках винта / таких нарезок, можно обеспечивать переключением катушек 10 электромагнитного возбуждения каждой гайки при неизменной частоте вращения приводного двигателя 3 (или роторов, описанных выше) быстрое дискретное управление скоростью движения итанги 12.
В варианте исполнения преобразователя движения по рис. 4.13, и г, если требуется только преобразование поступательного или возвратно-поступательного движения с одними параметрами в движение аналогичного вида, но с другими параметрами, нет *обходимости в использовании приводного двигателя 3, отде-нного на рис. 4.13, в штрихпунктирной линией. Пусть элемент 18 перемещается вдоль направляющих со
cZZT
Рис. 4.13. Силовой верньер; а-с электромагнитной связью: б - с механической связью; в - для преобразования параметров поступательного движения (вариант с механической связью); г - для преобразования параметров поступательного движения (вариант с электромагнитной связью)
Скоростью vi; его внутренняя нарезка 14, сцепленная с наружной нарезкой муфты 7, снабженной катушкой 16, вызовет вращение муфты и сцепленного с ней винта / с частотой вращения = = v\/h , где h - шаг нарезки муфты. Но одновременно внутренняя нарезка 15 элемента 13, сцепленная с наружной нарезкой гайки 2, вызывает ее вращение в том же направлении с частотой вращения л, = Vi/Zz,., где - шаг нарезки гайки. Скорость поступательного перемещения винта / относительно гайки 2 будет 2= (Лр - laquo;в) А где -шаг нарезки винта / и внутренней чарезки гайки 2.
Примем для количественной оценки
h = 40 мм; /г, = 40,2 мм; = 40 мм.
Wfla V2 = VI (l/fK, - \IK) К = 5-10- vt, т. е.
*орость перемещения и соответственно усилие изменяются в 00 раз. Домкратом, построенным по этому принципу, можно Поднимать 1 т, прикладывая усилие в 5 кг при соответственно
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [ 28 ] 29 30 31 32 33 34 35 |




