 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [ 23 ] 24 25 26 27 28 29 30 31 32 33 34 35
Таблица 3.8. Данные дугц
Тип статора | Мощность на два статора, | Синхронная скорость, об/мин | Габаритные размеры LXHXB, мм | усилие двух CTj, торов, | Масса одного статора, кг | т, кг/кВт | Внутренний диаметр дуги, мм | Угол охвата иахови-ка, град | S см* | Высота пакета железа, мм | Удельное усилие, Н/см | Мощность на 2 статора, кВА | Т)С08ф |
СД 16-254-115-90 | 716X300X255 | , 95 | 31,7 | 2,546 | 0,55 | 0,187 | |||||||
С Д25-254-115-145 | 716X300X310 | 21,7 | 2,880 | 0,54 | 0,18 | ||||||||
СД40-405-107-170 | 103X360X340 | 1770 | 2,1555 | 0,57 | 0,25 | ||||||||
С Д63-405-107-250 | 103X360X420 | 3185 | 16,1 | 810 . | 2,2388 | 0,67 | 0,3875 | ||||||
СД160-555-96-210 | 1300X465X570 | 4082 | 15,3 | 1110 | 2,2321 | 0,88 | 0,1875 | ||||||
СД250-555-96-330 | 1300X465X690 | 6122 | 13,3 | 1110 | 2,3647 | . 320 | 0,84 | 0,18 | |||||
СД400-755-94-400 | 1625X490X780 | 9960 | 11,8 | 1510 | 2,6264 | 0,1875 |
Продолжается использование подобных машин и в послевоенное время. Если по линейным двигателям в нашей стране есть десятки интересных разработок, есть действующее уже около 25 лет ОКБ ЛД, но нет пока (к 1988 г.) ни одного завода, осуществляющего серийный выпуск таких двигателей*, то дугостаторные электродвигатели нескольких типов серийно выпускаются промышленностью. В табл. 3.8 приведены основные данные этих машин. Следует отметить, что только относительно мощные машины (150 кВт) выпускаются с синхронной частотой вращения = 150 об/мин, заметно отличающейся от достигаемой (см. табл. 2.3) у обычных многополюсных (2р= 16) асинхронных машин и, = 376 об/мин. У дугостаторной машины мощностью б кВт синхронная частота вращения = 300 об/мин. При этом массогабаритные показатели одинаковые или немною ниже, а энергетические показатели заметно ниже у дугостаторных машин. У такой машины мощностью 150 кВт т=11,8 кг/кВт (только по массе статоров), тогда как у близкой по мощности 16-полюсной обычной машины по всей массе машины имеем /п = 11,3 кг/кВт. Если принять, что масса ротора составляет примерно /з от всей машины, то сравниваемая величина тх1,5 кг/кВт; если учесть и разницу в частоте вращения, имеем
приведенное значение т laquo; 7,45 я; 11,8 кг/кВт, как и У ДУ
гостаторной машины. Но если у рассматриваемой 1б-полюсноИ
* Очень жаль, что приведенные в 1973 г. в гл. 7 [111] сведения о сушест вовании дороги Киев - аэропорт и городского трамвая с линейным тяговым привод и через 15 лет еще не соответствуют действительности...
(таторных машин серии СД
машины т1С05ф ж 0,68, то у дугостаторной машины ricostp laquo; laquo;0,188 - в 3,6 раза ниже.
Тем не менее у дугостаторных машин есть своя определенная область применения - в основном для бескорпусных приводов, где ротором такой машины является присущая самой конструкции механизма часть. Поэтому считать в дугостаторной машине какую-то эквивалентную массу ротора (или не считать массу ротора у сравниваемой с ней обычной машины) не совсем корректно. Дуго-статорная машина в этом случае имеет лучшие массогабаритные показатели, уступая все же по значению энергетического фактора )С05ф. По дугостаторным машинам имеется значительное количество книг и статей (например, [97], [100], [103] и др.). Мы ограничимся здесь лишь некоторыми сравнительными оценками и рассмотрением имеющихся интересных разработок дугостаторных двигателей постоянного тока (ДДПТ). Этим двигателям труднее найти себе бесспорную область преимущественного применения - создать машину постоянного тока на малые частоты вращения легче, чем машину переменного тока при промышленной частоте питающего тока, а массогабаритные и особенно энергетические показатели у обычной машины постоянного тока выше. Но поскольку, особенно при бескорпусном выполнении, могут представить интерес и 5ДПТ, в частности, с безобмоточным возбужденным ротором (впрочем, и у обычной МПТ вполне возможно выполнение такого Ипа ротора - с когтеобразными полюсами или с двухфунк- иональной статорной обмоткой - см. sect; 3.3), приведем из [6] Соответствующие описания таких принципиальных конструкций, конструктивная схема ДДПТ с продольным замыканием основного Магнитного потока (рис. 3.47) включает в себя дуговой статор /,
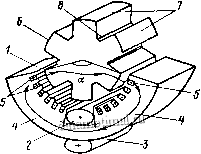
Рис. 3.47. ЛДПТ с прод(М1ьным замы, канием основного магнитного потока
.представляющий собой часть кругового кольца, в центральной части которого выполнен большой паз 2 ддя размещения обмотки возбуждения 3. Симметрично этому пазу по обе его стороны располагаются два одинаковых дуговых участка магнитопровода якоря 4, на которых выполнены пазы для укладки якорной обмотки 5. Ротор-формирователь магнитного поля 6 представляет собой ферромагнитное зубчатое колесо, зубцы которого 7 выполняют роль полюсообразующих выступов, разделяемых впадинами 8. Суммарная длина дуги дугового статора двигателя с продольным замыканием основного магнитного потока может составлять как четное, так и нечетное число полюсных делений.
В [6] приведена также конструкция дугостаторного двигателя постоянного тока с поперечным замыканием основного магнитного потока, а также с продольно-поперечным замыканием основного магнитного потока. У этого двигателя секции обмотки якоря являются общими для магнитопроводов, а ротор-формирователь поля выполнен из двух цилиндрических магнитопроводов, объединенных ферромагнитной цилиндрической втулкой таким образом, что зубцы магнитопроводов ротора располагаются относительно друг друга в шахматном порядке.
Известны разработки синхронных дугостаторных машин с возбуждением от постоянных магнитов [97]. Основное применение здесь нашли информационные микромашины - тахометры.
Дугостаторные машины - интересное, но отнюдь не универсальное решение задачи безредукторного электропривода.
ГЛАВА 4
безредукторный электропривод на базе машин двойного движения
4.1. ОСНОВНЫЕ ПРЕДПОСЫЛКИ И ПРИНЦИПЫ ПОСТРОЕНИЯ МАШИН ДВОЙНОГО ДВИЖЕНИЯ
Анализ, проведенный в предыдущих главах, позволяет сде-Г вывод о фундаментальном недостатке любого низкоскоростно безредукторного электропривода - малой эффективности взаи действия контуров тока и потока при невысокой скорости иЗ
нения потокосцепления. Действительно, электромагнитная мощность машины 5 = пгЕ/, где Е - ЭДС; / - ток; т - число фаз. 3 общем случае ЭДС обмотки е = -d-(p/dt, или при установившейся частоте вращения Е= ыфц. Если малы d\/dt либо ш, мала и ЭДС Е. В рамках обычных представлений о равенстве скоростей выходной оси привода и перемещения ротора относительно статора при отсутствии редуктора этот недостаток представляется непреодолимым. Это в самом деле так, пока движение происходит в одной какой-либо координате; один из элементов машины должен быть закреплен, чтобы, опираясь на него, мог под воздействием электромагнитных сил перемещаться второй элемент.
Актуальность задачи создания безредукторного электропривода с высоким использованием рабочего объема и приемлемыми характеристиками при малых скоростях движения выходной координаты привода привела к созданию нового типа электрической машины - двойного движения - с движущимся в разных плоскостях ротором и статором (сохранив за медленно движущимся элементом машины уже не соответствующее ему в строгом смысле слова прежнее название laquo;статор raquo;). Как это часто бывает в развитии какого-либо нового направления, элементы технического решения уже были подготовлены ранее. Так, до появления машин двойного движения уже были известны работы А. И. Москвитина [34] в области создания электрического молотка с винтовой карезкой на наружной поверхности ротора и на внутренней поверхности статора - ротор здесь совершает вращательное и поступательное движение, а статор остается, как положено, неподвижным. Варианты такого решения запатентованы во многих странах мира. Делались также многочисленные попытки электрифицировать известные механические соединения винт-гайка или червяк-червячное колесо. Одной из относительно недавних таких попыток является конструкция, изображенная на рис. 4.1. Здесь муфта 2 сцепляется с винтом / лишь при подаче напряжения к подводам катушки 4; при движении вдоль направляющей 5 муфта 2 может сжимать пружину 6, возвращающую муфту назад при снятии напряжения с подводом 3. На рис. 4.2 показан вариант выполнения такой схемы, когда муфта неподвижна, а винт совершает одновременно вращательное и поступательное движение - как в двига-
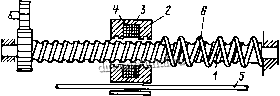
Рис. 4.1. Электромагнитная система винт -гайка с подвижной гайкой
утл -
шшшмттшш

Рис. 4.2. Электромагнитная система винт - гайка с перемещаемым винтом
теле-электромолотке А. И. Москвитина, упомятутом выше. В нашем рассмотрении систем безредукторного электропривода именно этот двигатель А. И. Москвитина явился отправной точкой для создания машины двойного движения (МДД). Рассмотрим вначале МДД вращательного типа - низкоскоростной безредуктор. ный привод [76].
Целью разработки являлось принципиальное расширение функциональных возможностей электрической машины путем обеспечения двух независимых видов движения: медленного вращения статора и быстрого вращения ротора, что осуществляется путем снабжения ротора опорно-осевыми подшипниками и расположением его оси перпендикулярно оси вращения статора. Ниже будет проведено принципиальное сравнение пределов упругости электромагнитной системы (с учетом ее площади сцепления) и механической системы с ее площадью сцепления. Рассматриваемые системы имеют соизмеримые габаритные размеры. Но предварительно хотелось бы подчеркнуть существенное эксплуатационное различие: при резком превышении нагрузки у машины двойного движения ее можно будет снова включить, уменьшив нагрузку; гораздо трудней восстановить работу механической системы с деформированными поверхностями.
Рассмотрим конструктивное выполнение МДД. На рис. 4.3 изображена описываемая машина для случая, когда на роторе размещается якорная обмотка.
Машина содержит статор /, установленный на валу 2, и ротор 3 - на валу 4. Ротор 5 имеет коллектор 5, ток к которому подводится щетками 6. На поверхности ротора имеются нарезка 7 и пазы 8 вдоль образующей цилиндрической поверхности ротора, в которые уложена обмотка 9. Полюса 10 расположены на ободе статора I. Их дуга относительно поверхности ротора 3 выбирается такой, чтобы образовалась часть полнополюснои системы, например, дуга каждого полюса 60 deg; с промежутком между ними в 30 deg; образует часть полнополюсной системы числом полюсов 2р=4. Между полюсами 10 имеются углубления , в которые уложена обмотка 12. На поверхности полюсов выполнена винтовая нарезка: выступы 13 и углубления 14 винт
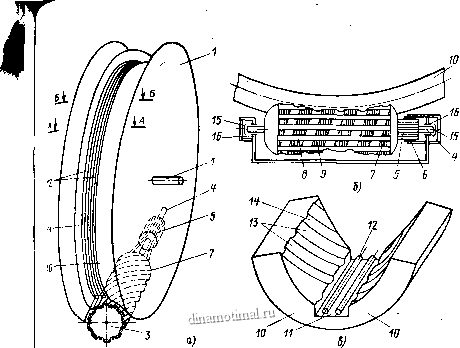
Рис. 4.3. Машина двойного движения: d - общий вид; 6 - вид сбоку на нижнюю часть двигателя; в - вид сверху на деталь
обода статора
ВОЙ нарезки. Ротор 3 машины установлен в опорно-осевых подшипниках 15 и радиальных подшипниках 16.
При подаче напряжения на щетки 6 коллектора 5 ротора 3 5 его якорной обмотке 9 возникают токи, взаимодействие которых с магнитным потоком полюсов 10 статора /, созданным, например, laquo;бмоткой 12, уложенной кольцом в углублении обода колеса статора 1, вызовет появление вращающего момента на поверхности ротора 3. Ротор начнет вращаться в подшипниках 75 и 16, но если при включении выступы винтовой нарезки 7 на поверхности ротора 3 и выступы винтовой нарезки 13 на поверхности полюсов О статора совпадут, то при повороте ротора в, неподвижных полюсах выступы 7 винтовой нарезки ротора начнут сдвигаться в торону углублений 14 винтовой нарезки на поверхности полюсов вызывая уменьшение магнитного потока, сцепляющегося с оеими поверхностями. Это вызовет появление препятствующего Изменению потока усилия, приложенного в противоположных Правлениях вдоль оси ротора 3 и вдоль касательной к окруж- ости полюсов 10 колеса статора 1; но осевому перемещению Ротора 3 препятствуют опорно-осевые подшипники 15. Следова-.но, под воздействием касательного усилия, пропорционального
l lt;i\ (где W - магнитная энергия в зазоре между полюсами lO
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [ 23 ] 24 25 26 27 28 29 30 31 32 33 34 35 |




