 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 [ 21 ] 22 23 24 25 26 27 28 29 30 31 32 33 34 35
\\ \\ | |||||
1 | |||||
-. |
Рис. 3.40. Сводный график результатов испытаний натурного образца линейного двигателя с двухфункциональной об-моткой:
/ - удельная тяга; 2 - удельное притяж.
ние;--нерарезные полюса; J
= 3,1 А/мм;----- разрезные полю
зк,= ~ А/мм-;-х -X -разрезные полюса, У-5,76 А/мм
Рис. 3.41. Линейная электрическая машина с некоммутируемым возбуждением:
а ~ принципиальная конструктивная схема; б - полюсная система на , концах шца., железнодорожного пути
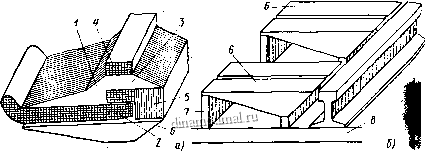
ОСЯМИ двух соседних полюсов выполнено равным двум полюсным делениям указанной обмотки.
На рис. 3.41, а показана принципиальная схема машины в аксонометрии, на рис. 3.41, б - полюсная система при ее установке вблизи рельса на концах шпал железнодорожного пути.
Линейная электрическая машина [71} содержит подвижную тележку, на которой укреплен магнитопровод / с якорной обмоткой 2. Магнитопровод / имеет выступ 3, на котором замещена обмотка 4 возбуждения. Магнитопровод / с выступом 3 имеют шихтовку в направлении, перпендикулярном движению. К выступу 3 магнитопровода прилегает сердечник 5, шихтованный в направлении движения. На пути перпендикулярно направлению движения тележки размещены ферромагнитные полюсы 6, разделенные в направлении движения одним или несколькими зазорами. Расстояние между осями двух соседних полюсов выполнено равным двум полюсным делениям якорной обмотки. Ферромагнитные полюсы 6 укреплены на неферромагнитных, например Д ревянных, балках 7, установленных на шпалах 8.
Машина работает следующим образом. При подаче напряжения в обмотку возбуждения 4 возникающий магнитный пото проходит по пути сердечник 5, зазор, полюс 6, зазор (пересека якорную обмотку 2) и замыкается, проходя по части магнйто
ровода /. При подаче в якорную обмотку тока (режим двига-теля) взаимодействие его с потоком, имеющим место практически только над полюсами 6, вызывает знакопостоянное усилие, 1нрИВ0Дящее в движение тележку. Знакопостоянство усилия обе- печйвается благодаря тому, что в обратном направлении ток 1нротекает в проводах, смещенных на полюсное деление т от проводов, расположенных над полюсами, и, так как полюс занимает расстояние, равное или несколько меньше т, и межполюсное пространство, где практически нет потока возбуждения, равно или несколько больше т, обратного знака усилия обратные токи не создают. При движении знак тока в секциях якорной обмотки меняется для синхронной машины синхронно с движением в связи с питанием якорной обмотки переменным током; для автосинхронной машины (постоянного тока) изменение знака тока обеспечивается коммутатором, например коллектором, синхронизированным с движением тележки.
В режиме генератора наводимые в секциях якорной обмотки ЭДС могут непосредственно использоваться как система напряжений переменного (с частотой движения) тока либо выпрямляться тем или иным способом. Реверсирование двигателя может осуществляться изменением либо знака тока, либо потока возбуждения; регулирование - одновременным или раздельным изменением тока в цепи возбуждения и якоря. Следует подчеркнуть одну особенность машины: благодаря поперечной шихтовке магнитопровода увеличивается магнитное сопротивление на пути потока реакции якоря, что благоприятно сказывается на устойчивости поля машины; особенно высока устойчивость при беспазовой якорной обмотке.
Сердечник 3 шихтован в направлении движения, и это позволяет при перемещении тележки относительно полюсов потоку возбуждения перемещаться по сердечнику вдоль движения, тогда как поток, сцепляЮ1цийся с якорной обмоткой, всегда проходит поперек движения - вдоль листов магнитопровода /. Сквозной разрез полюсов позволяет существенно снизить поток реакции якоря. При несквозном разрезе неразрезанная часть полюса представляет собой обход разреза для потока реакции якоря, и при Не слишком насыщенной стали полюса указанный поток уменьшается незначительно.
При таком исполнении в коллекторной машине реактивные ЭДС алы, что повышает надежность работы. Если ограничиться Целей регулирования и реверсирования только изменением ока в цепи якорной обмотки, можно существенно улучшить Мергетические показатели машины, применив в качестве обмотки
зоуждения 2 сверхпроводящий контур с током в соответствую- криостате и организовав в определенном месте подготовку ких контуров с заменой работающих контуров при снижении
УЦии в рабочем зазоре или после определенного времени
работы. Характер прохождения магнитного потока вдоль полюсоц и листов пакета магнитопровода / позволяет существенно сни, зить их массу, так как по мере приближения к краям потоц проходящий через поперечное сечение полюса и магнитопровод j уменьшается, что позволяет выполнить высоту полюса и магнитов провода убывающими по мере приближения к краям, соответствен, но уменьшая их массу, что особенно важно для полюсов, которые в ряде случаев нужно укладывать на многие километры пут Такая машина может выполняться как универсальная - автосин-хронная (постоянного тока), синхронная и асинхронная. В асин-хронном варианте несколько (например, три) laquo;модулей raquo; (опи, санные выше магнитопроводы 1 и 3 с обмоткой возбуждения 2 и якорной обмоткой 5) выполняются с длиной (по направлению движения) кратной двум, и устанавливаются на тележке друг за другом со сдвигом (при трехфазной системе) на 2/3 длины, их обмотки возбуждения включаются в трехфазную сеть, а якорные секции соединяются соответственно друг с другом, например, последовательно, причем одни концы полученной таким образом общей якорной обмотки закорачиваются, а во вторые включаются регулирующие, пусковые подпитывающие или иные устройства (аналогично, например, асинхронной машине с разноимённопо-люсной системой, описанной в sect; 3.2). Преимуществом у этого варианта является уменьшенное вдвое число зазоров на пути магнитного потока, резкое снижение потоков рассеяния и др. Следует отметить, что с одной и той же полюсной системой, установленной на пути, могут взаимодействовать установленные на тележках различные laquo;модули raquo; - синхронные, асинхронные, постоянного тока. Определенные преимущества автосинхронной машины с разрезными полюсами реализуются также в цилиндрической конструкции такого двигателя.
Расчет такой машины показывает, что при полезной мощности
= F, v = 15 ООО Вт КПД т) = у- =0,51. Это неплохой
результат для столь низкоскоростной машины (ЛАД близкой мощности имеет при v = 0,5 м/с показатели на порядок хуже).
Представляет значительный принципиальный интерес применение в качестве линейного двигателя в определенной степени laquo;автосинхронной raquo; однофазной коллекторной машины переменного тока - репульсионного двигателя. Такой двигатель позволяет благодаря низкому значению якорного напряжения и мало индуктивности якорных секций обеспечить контактную коммУ цию (закорачивание работающей в данном положении экипа части якорной обмотки). Это создает возможность обойтись самого тяжелого, дорогого и относительно менее надежН deg; элемента системы - тиристорного преобразователя, применен, которого особенно затруднительно при размещении fir.f обмотки на протяженном пути. Машина представляет со
азвитие конструкции, описанной в [75]. На рис. 3.42 показана ( хема, поясняющая принцип действия такой машины. Колеса / контактируют с то ко проводящей шиной 2, контактные высту-1,1,1 3 секций алюминиевой обмотки 4 (условно показанной на рйс. 3.41 в плоскости чертежа) смещены на заданную величину 2 относительно оси потока обмотки 5, включенной между пантографом 6 (скользящим по питающему проводу 7) и заземлени-8 (например, обычного типа колесо-рельс). Это эквивалентно смещению оси короткозамкнутых щеток относительно оси потока возбуждения у вращающегося репульсионного двигателя и обеспечению наведения в обмотке 4 ЭДС U - cos - , создаю-
щей даже при весьма низком отношении числа витков обмотки якоря 4 к числу витков обмотки возбуждения благодаря низкому значению сопротивления шины 2 значительный ток 4, при
этом возникает значительное тяговое усилие F ж 4Ф sin - .
Таким образом, весь тяговый привод состоит из уложенных на пути поперек движения алюминиевых проводов-шинок обмотки 4 с наконечниками 3 (например, медными), закорачивающей шины 2, размещенных на экипаже обмотки 5 и контактных колес 1. Из рис. 3.42 видно, что закороченным оказывается только участок обмотки 4 между первым и вторым (одна ветвь) и вторым и третьим (вторая ветвь) колесами 1. Но каждый участок обмотки 4 находится под током лишь малое время, поэтому допустима высокая плотность тока якоря. Поскольку сосредоточенная обмотка 5 может создать значительную индукцию, для обычных плотностей усилия порядка (3-4) -10 Н/м можно иметь отно-
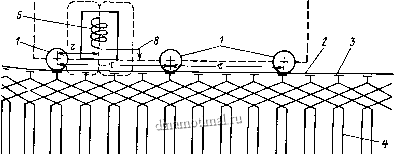
Рис. 3.42. Схема линейного репульсионного двигателя
сительно невысокую линейную нагрузку и, следовательно, умень, шить сечение обмотки 4 (самой дорогостоящей части системы при протяженном пути).
3.S. ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД ДЛЯ БЕЗРЕЛЬСОВОГО ТРАНСПОРТА
В [71] приводится пример применения обращенного ЛДПТ g качестве безредукторного привода для так называемой электро, страды. Дается описание системы путевых полос, в которые вмонтированы первичные элементы двигателей и с которыми вза-имодействуют электромобили, снабженные только вторичными частями этих двигателей - безобмоточными полюсами (преду, смотрены лишь система накопления энергии во время нахожде-ния электромобиля на электростраде для использования ее во время автономного движения вне электрострады).
Безрельсовая многолинейная трасса (рис. 3.43) оборудуется уложенными внутри твердого покрытия первичными частями линейного двигателя с обмотками и расположенными вдоль трассы преобразователями-коммутаторами (или другими источниками энергоснабжения). Экипажи оборудуются полюсной системой, возбуждаемой от автономного источника питания (например, аккумуляторных батарей).
Поскольку грузовые и легковые транспортные средства, как правило, двигаются с различными скоростями, электрострада в
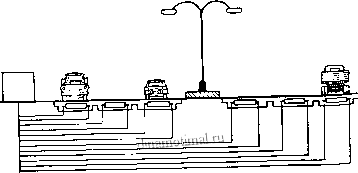
Рис. 3.43. Схема электрострады
каждом направлении должна иметь несколько (например, три) Qjioc для движения в каждом направлении: крайняя левая - д;,я скоростного движения, средняя - для движения грузового транспорта и крайняя правая - для въезда на электростраду съезда с нее. Для изменения направления движения на эле-ктростраде необходимо предусмотреть развязки по типу обычных д1я автострад. Каждая полоса движения представляет собой отдельную уложенную в твердом покрытии первичную часть с секционированной обмоткой, питаемой синхронным генератором или отдельным преобразователем частоты, фактически задающими скорость движения экипажа. Подключение секции к проложенным вдоль пути питающим шинам или шине осуществляется от датчиков, расположенных так, что управляющий включением какой-дибо секции датчик срабатывает несколько ранее, чем экипаж наезжает на эту секцию. Отключение производится от реле времени или датчиком, расположенным на одну-две секции сзади по ходу движения.
Для перехода экипажа с одной полосы движения на другую отключается система возбуждения полюсов, и экипаж переводится на режим движения от автономных двигателей, связанных с валом колес экипажа, и переходит на другую полосу движения или съезжает с электрострады на другое шоссе. Поскольку все транспортные единицы, находящиеся на одной полосе движения и двигающиеся в одном направлении, синхронизируются магнитным полем от одной системы управления, то практически исключается возможность наезда одного экипажа на другой. Кроме того, так как каждый экипаж является самоходной единицей, имеется возможность перемещать экипажи на достаточные расстояния от электрострады и затем возвращать их на нее энергией аккумуляторов. При движении по электростраде автономный дви-атель может переводиться в генераторный режим для подзарядки аккумулятора. Вся электрострада в целом может быть оборудована управляющей системой с применением ЭВМ, с помощью которой выбираются оптимальная скорость движения на каждой полосе мектрострады и безопасные интервалы между отдельными экипажами. Применение такой системы должно резко повысить пропускную способность электрострады и безопасность движения а ней. Возникающие между экипажами и путем центрирующие силы гарантируют устойчивость подвижной единицы на полосе движения независимо от погодных условий.
Принципиальное решение электрострады основано на при-снении линейного синхронного двигателя. В обмотках первичной
части
протекают токи заданной частоты, причем /,i gt;/2 gt;/i, где частота тока в первичной части крайней правой полосы дви- *ения. Экипаж в режиме автономного движения ускоряется по
lt;Рай:
ней правой полосе движения до тех пор, пока его скорость станет синхронной для данной частоты тока первичной части
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 [ 21 ] 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




