 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
ка, большее место (в том же данном объеме) для обмотки bq. буждения и т. п.
Отрицательно влияет на работу рассмотренной конструкции короткозамкнутый виток, который будет создавать на пути пото. ка возбуждения разделительная трубка. Эта конструкция рецц мендуется для тех случаев, когда разделительную трубку мощ выполнить из материалов с достаточно большим удельным со. противлением.
Рассмотренные выше бесконтактные гребенчатые машины позволяют получить многофазную, и в частности трехфазную систему токов (или вращение фазы однофазного тока) в фуц! ции перемещения явнополюсного плунжера.
Как показывают сравнительные расчеты, эти своеобразные электрические машины, используемые в качестве датчиков сии-хронной связи, в данном объеме и при заданных зазорах межд) гребенками статора и подвижным плунжером (если учитывать толщину разделительной трубки) создают наибольшую модуля-цию потока в фазах статора.
Все это позволяет считать целесообразным разработку электрического синхронного привода для решения задачи силового линейного перемещения, поступательного, возвратно-поступательного, синхронно-следящего, выполняющего перемещение с точной остановкой в заданной точке и т. п. (в том числе в герметически закрь[тых объемах, в средах с высоким давлением, большой агрессивностью и др.) Подобные задачи в большом количестве возникают при управлении современными технологическими процессами.
На рис. 3.24, а показан электродвигатель типа реактивного синхронного электродвигателя с явнополюсным плунжером без обмотки. При массе 5 кг плунжер создает усилие 150-180 Ни работает со скоростью (6-8)-10 м/с, т. е. отдает механиче скую мощность 12 Вт при потребляемой мощности около 100 Вт. Таким образом, двигатель работает с КПД около 0,12, вполне приемлемым для малого электродвигателя со столь большими зазорами в магнитной цепи.
Дальнейшее развитие гребенчатых систем позволяет еше лучше использовать магнитную цепь этой машины при сохранении такой же разделительной системы между внутренним объемом и наружным пространством. Для этой цели разделительные стенки привариваются к полюсам гребенки (рис. 3.24, raquo; и лишь немного уменьшают сечение окна катушек гребенок. Зазор же между зубьями гребенок и зубьями плунжера може быть установлен технологически минимальным (например, 0,25 мм на сторону). Таким образом, можно на этой основе создать линейную электрическую машину как для датчика, пер дающего перемещение из объема с давлением в несколько тыс* килопаскалей, так и для приемного электродвигателя, обесП
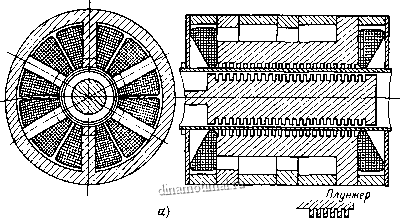
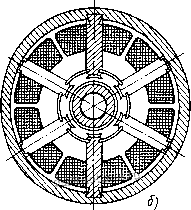
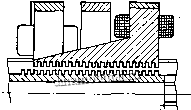
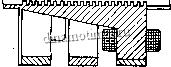
Рис. ,3.24. Линейный цилиндрический гребенчатый электродвигатель
чивающего перемещение рабочих органов внутри изолированного объема. У такой линейной электрической машины зазоры в магнитной цепи не превышают зазоры в традиционных электриче-их машинах. Дальнейшее развитие принципиальной конструкции с laquo;разделенными фазами raquo;, приведшее к созданию ряда но-Ьх машин вращательного и поступательного движения, здесь рассматривается.
Одной из наиболее сложных задач теоретического анализа Работы гребенчатых конструкций двигателей является определение магнитной проводимости зазора между зубчатыми ротором етатором при их различных взаимных положениях. Зависи-
в - с н Ч
/г /г /2 /г /г /г /2 tz tz /г iz
Рис. 3.26. Изменение проводимости в зависимости от взаимного сме-щения гребенок
О а а*д*.
Рис. 3.25. Взаимное расположение двух гребенчатых поверхностей
мость магнитной проводимости от перемещения ротора относительно статора определяет усилие в двигателях.
Рассмотрим воздушный зазор между двумя поверхностями ферромагнитного материала: ABCDE - поверхность гребенки и /СЯбР - поверхность плунжера (рис. 3.25). Принимаем магнитный потенциал ф на поверхности ABCDE равным нулю, а на поверхности LKHQP равным фо=0,8 F. Введем безразмерную фунюдию и = ф/фо- Тогда Ubcde= 0; Ulkhqp= 1-
Обозначая период гребенки через /, имеем для любого z в пределах длины гребенки (при пренебрежении краевым эффектом, считая гребенку достаточно длинной в отношении периода 0:
и (X, у, z + l) = U (X, у, Z), (3.311
а также
dU/dz (х, у, Z) = dU/dz (х, у, Z + 1). (3.32)
Считая зуб гребенки достаточно широким (в отношении зазора между плунжером и гребенкой), рассматриваем плоскую задачу изменения проводимости на единицу ширины зуба в соответствии со схемой на рис. 3.26. Для этого случая уравнение Лапласа имеет вид
(3.33)
!+! =0.
Энергия магнитного поля
(3.34)
Удельная энергая магнитного поля на единицу ширины зуба
Удельная магнитная проводимость, приведенная к рю,
(3.36)
Лстинная функция поля U есть именно та функция, которая минимум функционала G. Поэтому будем решать нашу за-gqy вариационными методами. Для наилучшего выбора пробных функций используем тот факт, что для прямоугольных областей (g нашем случае, например, BCDE) можно решать задачу выбора функции (задача Дирихле) методом разделения переменных. Решение этой задачи приведено в [71] и дает следующее уравнение:
[гГзз + I г - 4 Г,з+ f 3,.+ -L f - I F,3+
16/гЛ
laquo; Or.
[Зл+ аГзз+зз-Ь
2Ти + Рп +
(3.37)
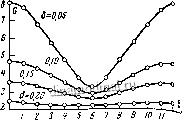
где значения Г и F, вычисляются для различных А и б, причем достаточно ограничиться значениями А =1/2; 2/3; 1* и S= 0,05; 0,1; 0,15; 0,25.
По данным расчета построены кривые на рис. 3.26. Зная функцию G (I), нетрудно получить и все остальные параметры линейных машин - усилие (мощность), а после анализа потерь- КПД и другие параметры. Расчет можно провести на ЭВМ по программе, составленной по приведенным выше формулам.
Если показанный на рис. 3.16 линейный двигатель, описанный в [ПО] в 1971 г., является определенным повторением конструкции линейного сельсина, описанного в [73] в 1959 г., то для многих линейных синхронных (в том числе и автосинхронных) машин прототипом можно считать бесконтактный сельсин ВЭИ, изобретенный в 1938 г. [31] и запатентованный в основных про-мышленно развитых странах мира в 1940 г.
Сравним бесконтактный сельсин с односторонним вводом потока [61] с линейной синхронной машиной [ИЗ]. У бесконтактного сельсина (рис. 3.27) магнитный поток, созданный ка-УШкой возбуждения 7, расположенной на первичной части и еподвижной относительно якорной обмотки 4 ( laquo;обмотки син-
хрон
ОЛЬН
*нные
изации raquo; в сельсинной модификации), поступают через до- ительные зазоры 2 в чередующиеся полюсы 5 и 5, отде-немагнитной прослойкой 6 друг от друга.
его мер й= 1 не означает отсутствие зубца, а лишь столь малую ширину Что ею можно пренебречь по сравнению с шириной паза.
5 7 7
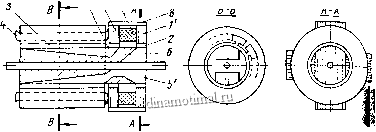
Рис. .?.27. Бесконтактный селы;ин с односторонним вводом потока
При питании обмотки возбуждения 7 постоянным током laquo;первые raquo; полюсы 5, в которые поток поступает через дополни, тельный зазор 2 из тороида / (здесь и ниже тороидом мазыва, ется кольцевой пакет магнитной системы), будут, например, ю, ными полюсами 5, laquo;вторые raquo; полюсы 5, из которых поток через дополнительный зазор 2 идет в тороид / (замыкаясь через внеш. НИИ магнитопровод 8) северными полюсами N. При перемещение относительно друг друга полюсов ротора и якорной обмотки \ статора против каждой заданной образующей линии внутреннего цилиндра статора будут попеременно находиться то полюс 5, то полюс iV, обеспечивая работу синхронной машины с возбужденными, но безобмоточными полюсами. Якорную обмотку пересекает поток возбуждения, переходящий из полюса в полюс через рабочий зазор J, зубцы, спинку статора и снова рабочии зазор i, совершенно аналогично машине с обмоткой возбуждения на полюсах ротора.
Линейная синхронная машина, показанная на рис. 3.28, ж существу есть развернутая в линию описанная выше машина. Здесь магнитный поток, создаваемый обмоткой возбуждения I из левой (верхней) полосы laquo;развернутого тороида raquo; 6 через до полнительный зазор 2 идет в полюсы отделенные немагнитнои прослойкой 5 от полюса i(T. е. это laquo;развернутый raquo; ротор бес контактного сельсина). Из полюса i (5) через рабочий зазор магнитный поток возбуждения, взаимодействуя с якорной о моткой 4, проходит в зубцы, затем в спинку статора, снова чере зубцы и рабочий зазор 8 в полюсы 3 {N), оттуда через допо.т нительный зазор 2 в правую (нижнюю) полосу - второй laquo;р вернутый тороид raquo; 7.
Конечно, laquo;развернутая raquo; линейная машина имеет свойства отличающие ее от кругового прототипа. Главным образом этс связано с разомкнутостью магнитной цепи, входом во взаим действие с первичной частью ранее не возбужденных полюс * и выходом из режима взаимодействия ранее возбу.жденных п люсов (ниже это будет подробно рассмотрено). Но основн* принцип действия линейной машины по рис. 3.28 и бесконтак ного сельсина по рис. 3.27 один и тот же. 106
2 SS 9-
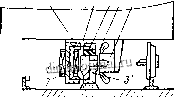
Рис- 3.28. Линейная синхронная машина - развернутый бесконтактный селы;ин
Аналогичное совпадение основного принципа действия можно роследить у так называемой гомополярной машины [113] при сравнении с однополюсным бесконтактным сельсином [73].
При создании бесконтактного сельсина был использован метод синтеза, рассмотренный в [79], [73]. Было показано, что ЛАЯ создания сельсина с синхронизирующим моментом, пропорциональным sin 9 (где G - угол рассогласования между осями датчика и приемника), можно использовать устройства, у которых изменяющийся в функции угла параметр (например, напряжение на фазе вторичной обмотки) может изменяться не только в виде i/a= U sin а, но и в виде Ll sin а, вообще,
модулируемый параметр а = ап-\- ai sin а.
Это обстоятельство позволяет применить в качестве бесконтактного сельсина машину, принципиальная схема которой показана на рис. 3.29, Поток, создаваемый обмоткой возбуждения 5, через тороид 6 и зазор переходит в пакет ротора 2, занимающий почти все сечение ротора, затем через пакет полуколец 3 и через второй (рабочий) зазор поступает в статор 4, проходит через зубцы, между которыми заложена вточная обмотка, в спинку статора. Из последней поток непосредственно переходит в пакеты внешнего магнитопровода /, замыкая путь вокруг катушки

Рис. 3.29. Однополюсный бесконтактный сельсин
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




