 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
Испытания проводились при следующих параметрах двигателя ц сети: полюсное деление т= 0,132 м, воздушный зазор 6=0,004 , ширина индуктора bi = 0,l м, ширина головки рельса Z)2=0,07 ц, число пар полюсов р = 4, активное сопротивление рассеяния Л = 0,76 Ом, реактивная полоса - рельс типа Р65, напряжение сети VI = 380 В, частота сети /i = 50 Гц. Пусковой фазный ток на два двигателя /] = 200 А, активная потребляемая мощность Pi = 48 кВт. Определение механической характеристики произво, дилось по способу киносъемки разгона, выбега и торможения противовключением.
В результате проведенных испытаний помимо механической характеристики были определены следующие величины: полная потребляемая мощность S] = 132 кВ А, коэффициент мощности при пуске cos(p y = 0,364, пусковая электромагнитная мощность Рг пуск = 29 кВт, пусковой электромагнитный КПД Пэм.п = 0,605, По исходным данным эксперимента произведен расчет механической характеристики одного РеЛАД, а также изменение нормальной силы, потребляемой мощности, тока, индукции в зазоре в функции от скольжения. Сравнение экспериментальной и расчетной механических характеристик показало хорошую сходимость (рис. 3.13).
Рассмотрение механической характеристики и данных двигателя позволяет оценить v laquo;7 м/с и F = 500 Н, т. е. Р2=3,5 кВт, и, соответственно, т]С05ф= 0,03; для такой скорости этот показатель меньше, чем у линейного двигателя с обычной реактивной шиной при тех же воздушных зазорах (до 5-7 мм), но при этом возникает существенное преимущество - отсутствие необходимости в специальной вторичной части.
Это может в ряде случаев оказаться решающим с экономической и эксплуатационной точек зрения. К сожалению, требуемое трехфазное питание не позволяет использовать имеющиеся системы энергоснабжения - оборудование дополнительных контактных рельсов может серьезно сузить область применения такого решения. Возможно, что такой привод будет наилучшим образом использован для автономных локомотивов - в этом случае не требуется специального токоподвода, и простота выполнения и применения РеЛАД могут быть полностью использованы Цилиндрические линейные асинхронные двигатели (ЦЛАД) получили определенное развитие для относительно короткоходовых низкоскоростных приводов. Так, в Новосибирском электротехническом институте [11,43] были разработаны трехфазньи ЦЛАД с полюсным делением 5-7 мм, что позволяет получить синхронную скорость примерно 0,6 м/с. В этой конструкции (рис. 3.14) применены пластинчатые спиральные катушки мало толщины на статоре и ферромагнитный сердечник, на которы насажены чередующиеся между собой медные и ферромагнитные кольца. В [43] рекомендуются такие ЦЛАД для привода р 90
Z в о Р
X с Y 0 0 9

Рис. 3.14. Цилиндрический линейный асинхронный двигатель
движных дверей; фрамуг цехов и теплиц; автоматических стрелок; сортировочных устройств; шиберов, рычагов, толкателей, кареток автоматизированных устройств.
Технические характеристики одного из изготовленных двигателей: масса двигателя 9,9 кг, рабочий ход 360 мм, трехфазное питание напряжением 220/380 В, частотой 50 Гц, режим работы ПВ = 25% или ПВ= 1007о, пусковое усилие 240 Н или 120 Н, синхронная скорость 0,58 м/с, пусковое усилие, приходящееся на 1 СМ активной поверхности, 1,17 Н/см или 0,585 Н/см, рабочее усилие, приходящееся на 1 см активной поверхности, 0,73 или 0,365 Н, масса, отнесенная к рабочему усилию при ПВ= 100%, 81,7 кг/кН, энергетический фактор i]Cosq; при ПВ=100%-0,01, полная потребленная мощность 2,4 кВ - А, масса, отнесенная к полезной мощности при ПВ = 100%, т=392 кг/кВт.
Механическая характеристика приведена на рис. 3.13. Показатели для ПВ = 100% необходимые для сравнения с другими двигателями, пересчитаны нами исходя из того, что Fub 100% ~
Общие тенденции развития линейных, в основном асинхронных машин и ряд полезных замечаний по выбору привода поступательного перемещения даны в [60, 61] и др. Любопытно отметить, То при известном преобладании общего числа публикаций в нашей стране имеет место относительно более низкая доля патентов (соответственно - авторских свидетельств) в публикациях-20% в СССР, против, например, 51% в США и 48% в онии. По мнению автора обзора [60], это связано с большим практическим применением этих двигателей в соответствующих ранах.
J.3. ЛИНЕЯНЫЕ СИНХРОННЫЕ И АВТОСИНХРОННЫЕ (ПОСТОЯННОГО ТОКд ДВИГАТЕЛИ ЛСД И ЛАСД (ЛДПТ)
Различие между синхронными и автосинхронными (далее везде постоянного тока) двигателями в основном в характер коммутации. В определенном смысле синхронными являются так, же линейные шаговые двигатели, у которых в установившемся режиме движения подвижный элемент шагового двигателя син хронно следует за перемещением подвижного элемента коммута тора. Исходя из этой концепции в одном из первых авторских свидетельств по бесколлекторным автосинхронным двигателям [7,3] с приоритетом от 26 января 1944 г. был защищен принцип построения таких машин путем установки на оси приемника i заданным сдвигом датчика следящей системы с усилением мо мента. В области создания линейных шаговых двигателей i Советском Союзе сделан целый ряд фундаментальных изобретений и разработок. Эти разработки широко реализованы описаны в [23-29].
Выше неоднократно указывалось на целесообразность (по соображениям экономичности и надежности) выполнять вторичную часть двигателя безобмоточной, отказавшись от размещения на ней обмотки возбуждения и тем более компенсационной обмотки и добавочных полюсов. В этих условиях особое внимание должно быть уделено правильному выбору преобразователя-коммутатора. Существенны трудности, связанные с использованием тиристорного или аналогичного преобразователя и практической неприемлемостью использования развернутого коллектора на пути. Это заставило вспомнить (или снова изобрести) предло женный в 1957 г. [70] коллекторный электрический двигатель, у которого коллектор не имеет механической связи с ротором и снабжен вращающимися щетками, отличающийся тем, что в нем щетки и ротор связаны при помощи электрической синхронной передачи. По этому авторскому свидетельству предусматривалось также введение регуляторов в систему синхронной связи и трансформаторов (в цепь коллектор - якорь) ддя улучшения коммутации. Предложен был и электромашинный агрегат с указанным двигателем, отличающийся тем, что к коллектору двигателя электрически присоединяются обмотки статоров нескольких электри ческих машин. Такой отделенный коллектор можно поместить в благоприятную среду. В 1971 -1972 гг. нами была разработан- и исследована экспериментальная установка, у которой ддя синхронной связи использовалась сельсинная система с совмещеннЫ сельсином-двигателем, но для транспортных линейных приводе* такую систему трудно рекомендовать даже при полной плавносТ1 хода и высокой точности следования щеток за смещением секД . первичной части двигателя относительно оси полюсов вторичн части. 92
Действительно, при этом практически сохраняются все функ-рнальные части преобразователя-коммутатора - датчик поло-рния, циклическая система включения выходных ключей, но мощность существенно (примерно в 20 раз при помещении коллектора в газовую среду и примерно в 10 раз - в жидкостную) сниется. Это снижение мощности ключей приводит к введению дополнительного двигателя с системой плавной отработки выходных сигналов упомянутых ключей и двойной системы щеток, скользящих по коллектору и подающих ток на эти щетки с дополнительных колец питания, и, наконец, механического коллектора в герметично закрытой установке с введением туда питания и вывода кабеля связи коллектор-якорь. Но самым существенным явпяется тот факт, что некоторое улучшение коммутации (в реально выполненных машинах с коллектором в благоприятной среде это улучшение не очень значительное) уже при скоростях движения примерно 10-20 м/с в упомянутых условиях (отсутствие добавочных полюсов и, соответственно, коммутирующей ЭДС е, относительно большой индукции поперечной реакции якоря В и др.) не может обеспечить необходимого качества работы коллекторного коммутатора.
Как известно, для тяговых машин (см., например, [63]) нескомпенсированная часть в, составляет примерно 0,1-0,18 реактивной ЭДС, допустимое значение которой не должно превышать 8 В, т. е. при отсутствии добавочных полюсов не должно превышать 0,8-1,5 В. Пусть в благоприятных условиях можно допустить --е = 34 В, где ед вызывается наличием В. Тогда используем известную формулу
e, + ea, = 2wMAAl, + Bg), (3.21)
где - число витков у коммутируемой секции; li - активная длина проводника (у линейной машины - ширина активной части Ь): - линейная скорость якоря (соответственно - линейная скорость движения у); А - линейная нагрузка; - эквивалентная магнитная проводимость.
У линейных машин с безобмоточной вторичной частью индукция реакции якоря в зазоре зоны коммутации В raquo; (0,25-f-0,3) Al , т. е.
е, + eag2,5w,bVAl (3.22)
ила тяги линейного двигателя
F=a,BAa-K)bU (,3.23)
где а, - расчетная относительная полюсная дуга; Вй - индукция, даваемая возбуждением над полюсом; L - активная длина масс й* учитывает снижение тяги, вызванное конструктивными Оенностями двигателя.
нашей приближенной оценки можно принять К = 0,2;
a, ft = 0,25 Тл (из-за значительных зазоров у транспортных ма. шин трудно обеспечить высокое значение Вер= laquo; gt;й)- Тогда
F=0,2AbL. (3.24)
Принято оценивать качество линейного двигателя по удельной тяге:
Fa.B.AO-K. (3.25)
Не менее характерной величиной, особенно для линейных двига-телей, располагаемых на экипаже, где при жестко ограниченной длине требуется значительная тяга, является тяга, отнесенная к единице длины машины,
F = F/L = а,В,АЬ (1-К). (3.26)
Для принятых величин
Г = 0,2АЬ. (3.27)
У современных мощных локомотивов длиной примерно 30 м сила тяги составляет 40 т (4-10Н). Для размещения линейных двигателей затруднительно использовать более чем 2/3 общей длины локомотива, т. е. д 20 м и F ;4-iOV20 = 2-10 Н/м, а из (3.27) АЬ-10. Подставим эту величину в (3.22):
e, + e, = 2,5w,-l0%v. (3.28)
Причем, как это имеет место лдя ряда обычных машин, 5,. = 6-10 (реально из-за использования у линейных машин относительно более глубоких пазов эта величина будет большей).
Примем также, что используются одновитковые секции для оценки минимально возможного значения нескомпенсированной ЭДС. Тогда + е = l,5v и принятое выше предельное значение е, + е ,3 В может иметь место лишь при v2 м/с
Можно записать в общем виде значение удельной нескомпенсированной ЭДС на I м/с скорости движения, используя (3.28) и (3.23):
= 2,51,
(3.29)
Для принятых данных
+e )/v = 7,5-10-F . (3.30)
На рис. 3.15 построены под углами Vi, 2, з, 4 к оси абсцисс прямЫ для разных f = (0,5; 1; 2; 3)-10 Н/м, соответствующие локомотивам с 1/4; 1/2; 1; 1,5 силой тяги относительно обеспечиваемой обычными двигателями (у= arctg = arctg7,5-10 f
Для достаточно эффективного линейного электропривода, не У-тупающего по тяге существующему обычному электропривод) предельной скоростью при пороговом напряжении будет 2 fr 94
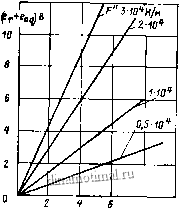
8 г;, м/с
РИС 3.15. Зависимость реактивной ЭДС от ости для разных удельных усилий ли-нейного двигателя
Лишь весьма неэффективный ли-, нейный электропривод, создающий вчетверо меньшую тягу, мо-ет выйти на предельную скорость 8 м/с. Следует указать, что ,рй значительных напряжениях J, относительно невысоких индукциях в зазоре выполнение одно-витковых секций потребует значительного увеличения количества коллекторных пластин. Размеры коллектора, его стоимость, затраты энергии на перемещение щеток, мощность вспомогательного двигателя для вращения щеток сильно возрастут, резко увеличится число жил кабеля якоря-коллектора, а единственный положительный эффект - снижение мощности выходных ключей преобразователя - невелик.
Если же принять iv,. gt; 1, то допустимая скорость v уменьшится пропорционально увеличению w,. Таким образом, для значительных скоростей, характерных для транспортных применений, система с преобразователем-коммутатором не имеет рациональной альтернативы.
Полупроводниковый коммутатор при достаточно высоких постоянных времени коммутируемых секций также имеет ограничение по скорости коммутации. На реально испытанном тиристорном коммутаторе были получены устойчивые результаты при т = 0,14м для у lt;12 м/с (соответственно для случая с т = 0,34 м, рассматриваемого ниже, v 30 м/с = 108 км/ч). Для получения скоростей в 3-4 раза больших требуется соответственно увеличивать г и уменьшать постоянные времени секций Г-,. Например, при снижении постоянных времени в 1,5 раза т = 0,68-i-l м, что затруднительно при размещении модулей двигателя под уже существующими локомотивами, но вполне возможно для заново проектируемых экипажей высокоскоростного наземного транспорта (ВСНТ).
Синхронные линейные двигатели в основном разрабатываются для ВСНТ, особенно в варианте совмещения двигателя с элек-Фодинамической подвеской. Рассмотрим ниже лишь отдельные конструкции, предложенные и для промышленного линейного - тектропривода. Основное внимание уделим линейным автосинх-Ронным двигателям. Определенное применение здесь нашли ци- ндрические линейные машины.
Многие конструкции цилиндрических линейных машин близки deg; Принципу построения к линейному сельсину, описанному, на-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




