 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 [ 13 ] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
зующего опору на рельсы (с вращающимися колесами), пример на 13% больше, чем для привода с вращающимися двигателякц Нас чаще интересуют динамические свойства самого привода -ускорение на единицу силы тяги, отнесенное к массе привода. Есдц учесть, что масса элементов привода составляет примерно 25 deg;/ массы локомотива, то можно сделать вывод, что динамические свойства самого привода за счет исключения его вращающихся элементов могут быть улучшены в 1,5 раза и более. И еще одц замечание, относящееся к сравнению КПД обычного электропрц. вода с механическим сцеплением и линейного, бесконтактного смысле механического сцепления) электропривода. Взаимодейст. вне сцепляющихся микровыступами поверхностей в первом случа; ведет как к нагреву этих поверхностей, так и к их своеобразной laquo;обдирке raquo; - отрыву частиц с поверхности колеса и рельса (шос. се). Единственным источником энергии для того и другого являет-ся в режиме тяги только энергия электропривода. Обычно КЩ такого электропривода определяется в виде
Т1пр = Т1 11д т1р,д, (3.19)
где т] - КПД преобразователя, включенного между источником питания (например, контактной сетью) и электродвигателем, здеа учитываются и потери в устройствах управления и регулирования: т]д, - КПД двигателя, для тяговых двигателей локомотивов оя довольно высок (например, для двигателя НБ 406 А - около 0,92); тр,д - КПД редуктора (ц = 0,95 0,96).
При таком расчете КПД системы привода от контактного про вода до обода ведущего колеса не учитываются потери как на нагревание трущихся поверхностей вследствии упругих деформа ций в слоях сцепления, так и на создание остаточных деформаций в этих слоях и особенно на отрыв механических частиц. Эти потери можно оценить примерно в 10-15% полной мощности локомотива [71].
Выше в основном рассмотрены данные по сцеплению и треник колеса о рельс, характерные для современного железнодорожного транспорта. Для автомобильного транспорта возникают лишь ко личественные отличия; ограничения, вносимые коэффициентов сцепления, имеют место и здесь. Для количественного анализ! этих ограничений можно воспользоваться данными, приведенным в [44].
Значения коэффициента сцепления и коэффициента трени /i принимаются для бетонного сухого шоссе (автострады) - = 0,69, /i = 0,01; мокрого шоссе г); = 0,5, /i = 0,05; щебеночног мокрого шоссе = 0,3; f\ = 0,03.
Весьма существенный разброс этих значений определяете состоянием самого шоссе (наличие выбоин, например, может высить коэффициент трения до значения f\ = 0,13) и, конечя состоянием поверхности колеса - на гладкой резине лучше 74
дпринимать путешествий по горным дорогам. В целом разброс нных для пары колесо автомобиля - шоссе еще больше, чем пары колесо локомотива (вагона) - рельс. Расчеты для слу-дя автомобиль - шоссе ведутся по формулам, аналогичным при-\денным выше, с учетом того обстоятельства, что здесь gm есть дррузка, приходящаяся на ведущие колеса, а gm - общий вес звтопоезда. Образование дорожной пыли - бетонной, асфальтовой j, резиновой (от истирания колес), осколков щебенки и т. п. не только снижает срок эксплуатации шоссе и автомобиля, но и является видимым свидетельством снижения реального КПД тягового привода автомобиля.
Здесь уместно указать, что именно ведущие колеса, особенно на подъеме, при разгоне и торможении, создают основную часть воздействия как при истирании трущихся поверхностей, так и в снижении КПД тягового устройства. Действительно, работа сил сцепления ведущих колес при этом в несколько раз (во многих случаях - на порядок) больше, чем суммарная сила трения всех ведомых колес - во столько же раз, во сколько суммарная сила тяги, идущая на преодоление подъема и (или) ускорения, а также сопротивления воздуха, больше, чем приведенное сопротивление трения колес состава; по нормативам тяговых расчетов [62] по- следняя величина примерно 2,5 Н на каждую тонну массы состава, тогда как сопротивление воздуха, например, при v = 20 м/с дает по (3.10) примерно такое же значение, а подъем в 10% - значение в 4 раз большее. Грубо приближенно можно сказать, что введение бесконтактной тяги (линейный двигатель на локомотиве) устранит /б истирания трущихся поверхностей и снижения КПД; введение, кроме того, laquo;бесконтактного опирания raquo; (подвески всего состава) устранит еще только /о этих последствий и потребует дополнительной системы поперечной стабилизации состава, роль которой при опирании колес на рельсы выполняют реборды колес. Мы не разбираем в данной книге вопросы подвески, которую слишком часто неразрывно связывают с линейным тяговым электроприводом. Укажем лишь, что при рекомендации безредукторного тягового электропривода для железных (рельсовых) дорог можно опирание на рельсы (и центрирование ребордами колес) оставид-ь. так, для того чтобы войти в будущее, поезда не обязательно должны сойти с рельсов...
3.2. ЛИНЕЙНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
Основными типами линейных двигателей являются асинхрон- е (ЛАД) и синхронные (ЛСД), из которых следует выделить РУппу автосинхронных двигателей, обычно называемых двигате-ми постоянного тока (ЛДПТ). Следует указать на определению условность подразделения линейных электродвигателей на нхронные, синхронные и постоянного тока при комплектации
зующего опору на рельсы (с вращающимися колесами), примерно на 13% больше, чем для привода с вращающимися двигателями Нас чаще интересуют динамические свойства самого привода -.. ускорение на единицу силы тяги, отнесенное к массе привода. Еслц учесть, что масса элементов привода составляет примерно 25 deg;/ массы локомотива, то можно сделать вывод, что динамические свойства самого привода за счет исключения его вращающихся элементов могут быть улучшены в 1,5 раза и более. И еще одно замечание, относящееся к сравнению КПД обычного электропри-вода с механическим сцеплением и линейного, бесконтактного (в смысле механического сцепления) электропривода. Взаимодействие сцепляющихся микровыступами поверхностей в первом случае ведет как к нагреву этих поверхностей, так и к их своеобразной laquo;обдирке raquo; - отрыву частиц с поверхности колеса и рельса (шоссе). Единственным источником энергии для того и другого является в режиме тяги только энергия электропривода. Обычно КПД такого электропривода определяется в виде
Лпр = ЛпЛдв Пред gt; ., (3.19)
где tin - КПД преобразователя, включенного между источником питания (например, контактной сетью) и электродвигателем, здесь учитываются и потери в устройствах управления и регулирования; Т1дв - КПД двигателя, для тяговых двигателей локомотивов он довольно высок (например, для двигателя НБ 406 А - около 0,92); Т1р, - КПД редуктора (л = 0,95 0,96).
При таком расчете КПД системы привода от контактного провода до обода ведущего колеса не учитываются потери как на нагревание трущихся поверхностей вследствии упругих деформаций в слоях сцепления, так и на создание остаточных деформаций в этих слоях и особенно на отрыв механических частиц. Эти потери можно оценить примерно в 10-15% полной мощности локомотива [71].
Выше в основном рассмотрены данные по сцеплению и трению колеса о рельс, характерные для современного железнодорожного транспорта. Для автомобильного транспорта возникают лишь количественные отличия; ограничения, вносимые коэффициентом сцепления, имеют место и здесь. Для количественного анализа этих ограничений можно воспользоваться данными, приведенными в [44].
Значения коэффициента сцегиения и коэффициента тренйЯ / принимаются для бетонного сухого шоссе (автострады) 4V = 0,69, /i = 0,01; мокрого шоссе = 0,5, f\ == 0,05; щебеночного мокрого шоссе = 0,3; f\ = 0,03.
Весьма существенный разброс этих значений определяется состоянием самого шоссе (наличие выбоин, например, может повысить коэффициент трения до значения f\ = 0,13) и, конечно, состоянием поверхности колеса - на гладкой резине лучше 74
рдпринимать путешествий по горным дорогам. В целом разброс Ланных для пары колесо автомобиля - шоссе еще больше, чем пары колесо локомотива (вагона) - рельс. Расчеты для случая автомобиль - шоссе ведутся по формулам, аналогичным приведенным выше, с учетом того обстоятельства, что здесь gm есть нагрузка, приходящаяся на ведущие колеса, а gm - общий вес двтопоезда. Образование дорожной пыли - бетонной, асфальтовой резиновой (от истирания колес), осколков щебенки и т. п. не только снижает срок эксплуатации шоссе и автомобиля, но и является видимым свидетельством снижения реального КПД тягового привода автомобиля.
Здесь уместно указать, что именно ведущие колеса, особенно на подъеме, при разгоне и торможении, создают основную часть воздействия как при истирании трущихся поверхностей, так и в снижении КПД тягового устройства. Действительно, работа сил сцепления ведущих колес при этом в несколько раз (во многих случаях - на порядок) больше, чем суммарная сила трения всех ведомых колес - во столько же раз, во сколько суммарная сила тяги, идущая на преодоление подъема и (или) ускорения, а также сопротивления воздуха, больше, чем приведенное сопротивление трения колес состава; по нормативам тяговых расчетов [62] по-; следняя величина примерно 2,5 Н на каждую тонну массы состава, тогда как сопротивление воздуха, например, при v = 20 м/с дает по (3.10) примерно такое же значение, а подъем в 10% - значение в 4 раз большее. Грубо приближенно можно сказать, что введение бесконтактной тяги (линейный двигатель на локомотиве) устранит / истирания трущихся поверхностей и снижения КПД; введение, кроме того, laquo;бесконтактного опирания raquo; (подвески всего состава) устранит еще только / lt; gt; этих последствий и потребует дополнительной системы поперечной стабилизации состава, роль которой при опирании колес на рельсы выполняют реборды колес. Мы не разбираем в данной книге вопросы подвески, которую слишком часто неразрывно связывают с линейным тяговым электроприводом. Укажем лишь, что при рекомендации безредукторного тягового электропривода для железных (рельсовых) дорог можно опирание на рельсы (и центрирование ребордами колес) оставид-ь. Итак, для того чтобы войти в будущее, поезда не обязательно должны сойти с рельсов...
3.2. линейные асинхронные двигатели
Основными типами линейных двигателей являются асинхронное (ЛАД) и синхронные (ЛСД), из которых следует выделить Фуппу автосинхронных двигателей, обычно называемых двигате- ями постоянного тока (ЛДПТ). Следует указать на определенную условность подразделения линейных электродвигателей на Синхронные, синхронные и постоянного тока при комплектации
приводов близкими по типу коммутаторами - преобразователя питающими близкие по типу обмотки, расположенные в одинако вых пазах и охватываемые проходящими по однотипным магнито проводам магнитными потоками. Будем далее относить это разд чие к режимам работы системы. Электроприводом с линейну! двигателем постоянного тока будем называть привод, механ;, ческая и регулировочная характеристики которого идентичны xj, рактеристикам коллекторной машины постоянного тока.
Синхронным будем называть привод, у которого полезное усц, лие имеет место только при заданной частоте питания / = i gt;/2, где V - скорость линейного движения; т - длина полюсного д, ления. Асинхронным будем называть привод, у которого именн; при этом соотношении (или вытекающим из него v = 2т/) bobcj нет полезного усилия. Тип машины не связан с тем, подается ли на вход преобразователя системы постоянный или переменньц. ток и имеются ли во вторичной части замкнутые контуры с tokos или явно выраженные полюсы. В качестве основы для анализ; будем применять фундаментальные положения электротехники учитывая трудности использования обычных формул классически: теории электрических машин.
В своей принципиальной основе линейные асинхронные двигатели (рис. 3.2) опираются на патент Зедена от 2 июня 1902 г (англ. патент № 12581). В описании изобретения сказано: laquo;Изо бретение относится к устройствам для приведения в движение железнодорожных экипажей, лифтов, возвратно-поступательньв частей машин, станков и других приспособлений посредством две жущегося (бегущего) магнитного поля. В применении к железные дорогам магнит (индуктор), возбуждаемый трехфазным или иныи током, устанавливается на экипаже вблизи от рельса (полосы) который играет роль короткозамкнутого якоря многофазного двигателя. Полоса может быть выполнена из стали либо из стали и ла туни или другого металла, и в ней для экономии массы laquo;
-I-L.
И
Рис. 3.2. Линейный асинхронный двигатель по патенту Зедена в 1902 г-
Рулировз тока проделаны отверстия (перфорации) различной %рины -для обеспечения пуска экипажа и т. п. Магниты (ин- кторы) могут быть установлены над или под полосой для уве-(чения сцепления или частичной компенсации массы экипажа. ОНИ могут быть расположены с противоположных сторон полосы 1йбо электромагнит (индуктор) может быть расположен с одной сторонь! полосы, а шихтованный пакет стали - с другой. Устрой-go может быть таким, что силы уравновешиваются или не уравновешиваются. В случае лифта, например, индукторы направлены наружу для взаимодействия с двумя направляющими полосами raquo;.
;1инейным асинхронным машинам посвящено большое количество публикаций, в том числе и отечественных. Это весьма популярная в последние годы тема диссертаций - кандидатских и докторских. Лет 20 действует специализированное конструкторское бюро, работают по всей стране десятки групп и лабораторий. Тем не менее нет на наших заводах серийного выпуска таких машин - количество защищенных диссертаций намного превышает количество - не серий, а экземпляров таких машин, успешно работающих в промышленности или выпущенных на серийном заводе.
Усовершенствованные конструкции линейного асинхронного двигателя подробно описаны в 130). На рис. 3.3 показан построенный в ОКБ линейных двигателей при Киевском заводе электротранспорта им. Дзержинского тяговый линейный электродвигатель, предназначенный дтя вагона монорельсовой дороги. Этот двусторонний линейный электродвигатель имеет следующие технические данные:
Напряжения питания f, В . . . ,
Номинатьный ток /, А......
Частота /, Гц........
Максимальная сила тяги f, Н , . Скорость двигателя v, м/с - . . . оэффициент полезного действия ц юффициент мощности cos ф
иэффициент использования подводимой полной мощности 11 COS (р .
tmmepbi индуктора: длина / , мм
ширина б мм ! е ., е е е ч е , е
380 200 50 3800 10,2 0,5 0,4 . 0,2
1260 210
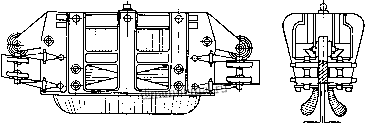
ис, 3 3
инейный асинхронный двигатель -для вагона монорельсовых дорОг
| 1 2 3 4 5 6 7 8 9 10 11 12 [ 13 ] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




