 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 [ 11 ] 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
2.4. РЕСПОНСИННЫЙ ПРИВОД
Электродвигатель, совмещенный с волновым передаточным щ ханизмом, получил название респонсинного привода [113J. У пускаемого фирмой USM (США) синхронного реактивного bqj нового электромагнитного механизма (ВЭМ) типа 16-100-01 щ М = 0,88 Н м и частоте питания / = 60 Гц, угловой частоте щ щения выходного вала ы = 3,8 рад/с полезная мощноц Рг = 3,3 Вт при потребляемой мощности Si = 30 В-А, т. j 11 = 0,11 и m = 1,35 кг, а т= 410 кг/кВт - для столь мало{ машины и низкой скорости вполне приемлемые показатели.
В [15] рассмотрено устройство шестифазного цилиндрическо. го волнового электромеханизма (рис. 2.17). В качестве статор, / респонсина может быть использован обычный статор машинц переменного тока. Обязательным условием является возможносц создания в расточке статора вращающихся зон возбужден магнитных полюсов. Число зон однозначно определяет число ьщ деформации в гибком звене. Для создания лучших условий про хождения магнитного потока полюсов служит гибкий дополни, тельный магнитопровод 2. Зубчатое колесо 3 с числом зубьев i встроено в статор / и составляет с ним единое целое. Чиад зубьев гибкого венца отличается от числа зубьев жесткоп колеса на одно или на два.
Обмотка статора представляет собой шестилучевую звез ду с общей нулевой точкой 0. Начала фаз звезды обозначен! буквами А, В, С, D, Е, F. Фазы между собой в пространстве сдвк нуты на угол л/3, причем каждая из них состоит из двух секции размещенных в диаметрально противоположных пазах статора При отсутствии напряжения на зажимах А, В, С, D, Е, F ротор располагается концентрически в расточке статора так, чтобы бы равномерный воздушный зазор бо. При подаче переменного на
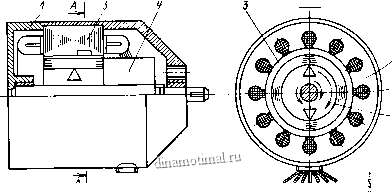
А Б СП Е F0 Рис. 2.17. Конструкция респонсинного двигателя
положные зоны возбуждения магнитных полюсов, вращающихся 0 скоростью oJo- Под действием механических сил F электро-LrHHTHoro происхождения ротор деформируется в овал, и его убчатый венец образует с зубчатым колесом статора две зоны волнового зацепления, также вращающиеся со скоростью Шо-
При этом (njiDi la 11н* lt;-д lt;-свлил vunjjui иилсние по 1 снциальных сил упругости, сил инерции подвижных масс ротора и сил трения в зацеплении, вызванных наличием момента сопротивления на
валу
Вращение зон зацепления при наличии разности зубьев приведет к относительному угловому перемещению вала респонсина с частотой i2 = 2оЗо /z.
Конструкция торцевого респонсина отличается от цилиндрической своими малыми осевыми и сравнительно большими радиальными размерами. Один из разработанных приводов [15] имеет следующие характеристики: напряжение питающей сети и = 220 В; частота / = 50 Гц; напряжение питания респонсина [/ =18 В; ток / = 2 А; номинальный вращающий момент W m = 0,6 Н-м; номинальная частота вращения (2 = 1,8 рад/с; !иаксимальная частота вращения t} = 2,2 рад/с; разрешающая способность ;V = 1308 шагов на оборот; число тактов на число волн равно шести; потребляемая мощность 5=36 В А; полезная мощность f 2 = 1,08 Вт; энергетический фактор T]cos(p не превышает 0,03.
Не выше энергетические характеристики и для приведенных в [15] двух модификаций макета торцевого респонсина (табл. 2.9): для первого макета гcosф = 0,0110,05, а для второго - 0,033. Для ВЭМ цилиндрического типа (табл. 2.10 gt; приведенные данные позволяют определить массогабаритный показатель т, равный 410 кг/кВт для типа 16-100-01 и 180 кг/кВт - для типа 16-100-5. У респонсинов типа HDM соответствующие показатели (табл. 2.11) находятся в пределах
Таблица 2.9. Технические характеристики торцевого респонсина

[Потребляемая мощность Р Вт щротивление фазы г. Ом
Модификация
100-300 | |
0,35 | 0,638 |
0,314-0,942 | 0,314 |
1,17 | 3,73 |
10,8 | 10,8 |
Таблица 2.10. Технические характеристкки цилиндрического респонсииа
HDUM
Параметр
Потребляемая мощность Р Вт Напряжение U, В Частота /ь Гц
Вращающий момент М, Н-м Число фаз mi
Частота вращения Q, рад/с Тормозной момент Н-м Сопротивление фазы г, Ом Шаг
Коэффициент полезного действия т) Масса т, кг
16-100-01
30 115 60 0,88 1
3,768 2,65
0,11 1,35
16-100-5
10 800 1,27
8 6,28 2,25
5 0,45 0,27
1,35
Таблица 2.11. Технические характеристики респонсинов типа HDM
г raquo; | |||||||
Параметр | о laquo;л | ||||||
Напряжение U, В | |||||||
Потребляемая мощность Pi, Вт | |||||||
Ток /, А | |||||||
Разрешающая способность N, | 1600 | 2000 | 1000 | ||||
шаг/об. | |||||||
Максимальная скорость Qax. | 31,4 | 11,8 | 11,8 | 9,42 | 9,42 | 6,8i | |
рад/с | |||||||
Вращающий момент М, Н-м | 0,84 | 0,46 | 0,46 | 0,46 | 0,46 | ||
Полезная мощность Рг, Вт | 2,64 | 5,42 | 5,42 | 5,42 | 5,42 | 18,82 | 49,i |
0,176 | 0,18 | 0,18 | 0,18 | 0,18 | 0,1 lt; | ||
Масса т, кг | 0,397 | 1,50 | 1,50 | 1,50 | 1,50 | 8,16 | |
Удельная масса т, кг/кВт | 277. |
150-430 кг/кВт, что не слишком много для таких малых мо ностей и небольших частот вращения.
Примеры промышленного применения респонсинов привед в [15] и сводятся к приводу ведущих роликов бумажной л печатающего устройства, приводу координатографа и при raquo; ходовых винтов двухкоординатного фрезерного станка.
ГЛАВА 3
ЛИНЕЙНЫЕ И ДУГОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ
, lt; ЛИНЕЙНЫЕ ЭЛЕКТРОДВИГАТЕЛИ КАК ОСНОВА БЕЗРЕДУКТОРНОГО ЭЛЕКТРОПРИВОДА ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
Развитие, которое получили в последнее время линейные элект-пические машины, позволяет считать их основой для создания безредукторного электропривода поступательного движения, а зт-от вид движения имеет место в 40- 50% реальных приводов (13]. Известной альтернативой для короткоходовых приводов является электромагнитный электропривод, ниже будет показана с)Щественная ограниченность областей рационального применения этого типа привода. Иногда включают в одну общую категорию дугостаторный и линейный электроприводы, объединяя их по общему признаку разомкнутости магнитной цепи индуктора (обычно это сравнение относят к асинхронным двигателям) и считая линейный двигатель частным случаем дуго-статорного ( laquo;дугового raquo;) при бесконечном радиусе дуги [103].
Рассмотрение истории возникновения этих двигателей, с одной стороны, и тенденций их развития, с другой стороны, позволяет считать такой подход необязательным. Действительно, патент Зедена 1902 г. на линейный электродвигатель [108], приводимый ниже, был, по-видимому, получен ранее, чем патенты на дугостаторные электрические машины. В тридцатые годы практически одновременно А. Г. Иосифьян создал первую отечественную конструкцию линейного асинхронного ( laquo;магнитофугально-го raquo;) двигателя, экспонировавшегося в 1937 г. на Всемирной выставке в Нью-Йорке, а П. А. Фридкин - конструкции дуго-статорных электродвигателей. Не будем поэтому устанавливать жесткую классификацию, бесспорно одно - линейный и дуговой электродвигатели создают близкие по ,типу безредукторные электроприводы. Рассмотрим основные варианты линейного электропривода [711.
В большинстве транспортных средств (тепловозах, электровозах и т. п.) вращающиеся элементы электропривода перемещаются вместе с самим транспортным средством. Такой тип привода имеет свои специфические особенности и применяется в основном для больших поступательных перемещений. При проводимом ниже сравнительном рассмотрении характеристик У больше всего соответствует линейный электропривод с размещением на транспортном средстве (экипаже) элементов, по-РеЬляющих от внешнего 1Источника электрическую энергию, Реобразуемую в механическую, этот тип привода будем назы-J прямой линейный электропривод или просто линейный laquo;тропривод.
3118
обращенный линейный электропривод, у которого указанн! элементы не перемещаются вместе с транспортируемыми сами, а расположены неподвижно на пути, представляете, правильным сравнивать с существующим электроприводом посту, пательно перемещающихся лент конвейеров, с многодвигательны. ми приводами рольгангов прокатного стана для поступательного движения прокатываемых изделий, с приводом лебедок, шахтньц подъемников, а также с приводами, обеспечивающими малы поступательные перемещения кареток самопишущих приборов дверей лифтов и т. п. В этом случае двигатель, обеспечивающщ поступательное движение каких-либо масс, сам неподвижен.
Следующему типу современного электропривода с цикли ческим возвратно-поступательным движением - приводу стро. гальных или долбежных станков, компрессоров, электромолотков и т. п.- соответствует линейный электропривод с двигателем возвратно-поступательного движения, подвижная часть которой непосредственно связана с перемещаемыми массами. Именвд циклический характер возвратно-поступательного движения является определяющим при выделении этого типа электропри вода.
Одним из наиболее характерных применений линейноге электропривода поступательного движения является тяговый электропривод транспортных средств. Если в рассмотренны! в гл. 1 и 2 примерах безредукторных приводов определяющим являлось именно отсутствие редуктора, то у линейных тяговы* приводов возникает новое свойство - изменяется сам характер создания поступательного движения.
У обычных транспортных приводов сила, создающая посту нательное движение (сила тяги), образуется почти исключи тельно за счет сцепления колес с микровыступами. Сила тяг raquo;: в этом случае определяется простым соотношением
F, = gm-, (3.
где - сила тяги, реализуемая при сцеплении данного кояеа (колесной пары, всех колес локомотива и т. п.) с путем; g ускорение свободного падения (g=9,Sl, м/с); т - масс транспортного средства, приходящаяся на данное колесо (к лесную пару и т. п.); mg обычно называется сцепным весо raquo; г) - коэффициент сцепления данного колеса с данным путе raquo; (или средний коэффициент сцепления данной колесной пары т. п. с путем).
Определяющее значение при этом имеет то обстоятельств что предельное значение коэффициента сцепления ограничен сверху критическим значением зависящим от большого чис случайных факторов [32]. Параметры кривой распределения зависят от вида привода и от состояния рельсов. Для современных отечественных электровозов при опреде-
г)к часто пользуются формулами, полученными по опытным .,ным Б. Н. Тихменевым:
lt; 45 км/ч
Av) = 0,235 + 10/(95 + llv); V = 45 4- 150 км/ч
г, = 0,08 + 95/(418 + 3v).
(3.2)
(3.3)
Это означает, что, например, при скорости в 150 км/ч расчет-jjoe значение i]V берется равным 0,19 и тяга современного электровоза со сцепной массой laquo; 184 т ни при какой мощности электродвигателей не может превысить значения gm\l\
3,5-10 И; а при скорости v = 100 км/ч г);, = 0,21 и сила тяги f lt;3,85-10 Н.
В [62] приводится ряд нормативных формул для определения сопротивления движения разного вида составов при трогании и для современных скоростей движения. Примем для нашего иллюстративного расчета близкое к одной из таких формул выражение
= (/ + /v + а) gm , (3.4)
где а - угол подъема; - коэффициент составляющей сопротивления движению, зависящий от скорости; т - масса поезда.
Для создания ускорения требуется дополнительная сила Fa = ha, где а - создаваемое ускорение. Для режима движения с ускорением (3.1) примет вид
Рг= [/ + Д + а + a/g] gm . (Ъ.5)
Используем для дальнейшего анализа понятие коэффициента полезной нагрузки /с = т /т, где т, -~ масса локомотива. Тогда из (3.5) с учетом (3.1) имеем
к [/ + Л + а + a/g] = я; lt; г),.
Наибольшее значение этой основной оценки использования транспортного устройства
н max ~7i 1 7 ;-~,-
(3.6)
1Н0ВИТСЯ в такой же мере случайным значением, определенным шь вероятностными характеристиками, как и значения г);, f , v- Но решающим фактором является разброс значений ф , ибо ак уже указывалось, составляет лишь небольшую часть сум-меньм - выражения (3.6) и разброс его значений также
Ще, чем г);; то же в определенной мере относится и к Ройств выбрать к, как загрузить данное транспортное уст-проме максимально использовать электропривод, имеющий
ажны* * звено типа laquo;сцепление микровыступами raquo;,- весьма е для практики вопросы.
| 1 2 3 4 5 6 7 8 9 10 [ 11 ] 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




