 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Системы регулирования
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 [ 59 ] 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193
sect; amp;i, точность ПРИ ЗАДАЮЩЕМ ВОЗДЕЙСТВИИ
Определить коэффициент передачи п масштабирующего устройств-а в выходной или входной депи, яри котором система яриобретает астатизм первого порядка относи-тельно управляющего воздействия.
л ,-----, ,
-2*н /7 Ир)
Рис. .126. Статическая система с масштабированием.
Решение. Передаточная функция замкнутой системы с учетом масштабирующего устройства
Условие получения астатизма первого порядка
пК=1+К,
откдаа -имеем
219. Для предыдущей задачи определить передаточную функцию разомкнутой эквивалентной системы без масштабирующего устройства.
Ответ,
Ф(р)
э(р) 1 ф(р) р(Т+ар-+-6р2) где эквивалентная добротность по скорости
К
коэффициенты
J\ + ri + T
[сек-Ц,
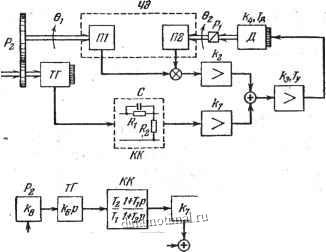
220. Для системы комбинированного управления (рис. 127) определить условия получения астатизма третьего порядка и коэффициент ошибки с. На рис. 127 обозначено: 5 - чувствительный элемент, состоящий из
НГур | ||||
Рис. 127. Система комбиняровапного управления.
двух потенциометров П1 и П2 задающей и принимающей осей, Д - исполнительный двигатель, Pj и Рч - ~ дукторы, ТТ -тахогенератор, /СК - корректирующий контур, б] - угол поворота задающей оси, % - угол поворота принимающей исполнительной оси, 9 = 6, - Og - рассогласование. Исходные данные: ky == 1 в/град = 57,3 в/рад - крутизна чувствительного элемента; 2 = 25 - коэффициент усиления по напряжению предварительного усилителя основной цепи; feg = 4 - коэффициент усиления по напряжению оконечного усилителя; 4 = 27,3 об/е мин = = 2,86 padle сек - коэффициент передачи исполнитель-
ного двигателя; fej = =-,1--коэффициент передачи
редуктора Pf, = 0,055 в мин/об = 0,525 в сек/рад - коэффициент передачи тахогенератора; kj - коэффициент усиления по напряжению предварительного усилителя в цепи коррекции, ftg = ь = 500 - коэффициент передачи редуктор?1 Рг; Ту = 0,005 сек - постоянная времени усилителя; 7д = 0,1 сек - постоянная времени исполнительного двигателя; Ti = RiC и == [. ~ постоянные времени пассивного дифференцирующего контура. Искомыми параметрами являются k, Ti и Гг-
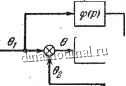
Рис. 128. Преобразоваипан структурная схема сиЬтемы комбиииро-ваниого управления.
Решение. Преобразованная структурная схема рассматриваемой системы изобраисена на рис. 128. Передаточные функции частей основной цепи:
1Г.(/7) = М2,
(Pf- р(1 + Гур)(1+7 raquo; Передаточная функция цепи коррекции:
Передаточная функция замкнутой системы,:
в-2{р) W{p)+4 gt;(p)W2ip) 1 + Г (р)
где , передаточная функция исходной разомкнутой системы
iP)-P)W,ip)-n, + Tjii-,T,p) (3)
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 [ 59 ] 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 |




