 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Прецизионные датчики, индукция
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 [ 41 ] 42 43 44 45 46 47 48 49
ими, установленными на различных ценах. Например, поскольку югрешность редуктора, связывающего шкалу, установленную на :амой высокой цене оборота, определяется в основном погреш-юстью последней пары, ближайшей к ВТ-5 (а она может быть юведена до 40-60 ), то вносимая редуктором погрешность не [1ревзойдет при р=180 0,2-0,3 .
i Если шкалу заменить на кодовый датчик угла, а поворот 8Т-5 в согласованное положение производить с помощью изме-эительиой следящей системы, описанной в гл. I, то появляется возможность автоматизировать измерения.
] На рнс. 87 показана структурная схема комплекса для автома-[11ческой проверю! точности круговых индуктосинов, нспользуе-иого нами в течение последних лет для исследования sKcnepiweH- гальных образцов. В качестве устройства для точного задания фик-рироваппых углов поворота служит прецизиоииая делительная машина TKF-1000 (производство ГДР).
[ Цикл работы делительной машины / состоит из фиксирован-юго поворота стола с установленным на нем ротором датчика 2 i кратковременной остановки. В расшифровывающей части комплекса имеется следящая система 3 с электрической редукцией (5 - двигатель, 10 - усилитель). Приемником следящей системы ;лужит вращающийся трансформатор ВТ-5 (4) класса Б. Следя-цая система может быть амплитудной (см. рис. 14), если дат-
Ек проверяется в амплитудном режиме. При проверке индукто-на-фазовращателя следящая система может быть выполнена по еме, показанной на рис. 19. В кинематической цепи, связывающей исполнительный двигатель 5 с приемником следящей, системы (СС) установлен однооборотный пятиразрядный кодовый преобразователь угла 6 (КПУ). К КПУ подключен преобразователь 7 код-напряжение, к выходу которого подключены самописец 8 и перфоратор 9. Цена оборота кодового преобразователя переменна и может по отношению к ВТ-5 принимать значения 3607480, 3607240, 360780. Учитывая, что следящая система имеет коэффициент электрической редукции, равный числу пар полюсов проверяемого индуктосина, для получения истинной цены юрота (приведенной к цене оборота делительной машины) кодо-Го преобразователя указанные вьш1е цены оборотов должны ыть разделены еще на р. В результате, например, для р=Ш цена одного кванта кодо-1Го преобразователя может составлять соответственно 0,5; и 3 .
Очевидно, что если установить для машипы шаг, равный nfpk, где k - один из делителей чисел 480, 240 или 80, то кодо-ый преобразователь в идеальном случае будет делать . целое исло оборотов и будучи установленным каким-либо образом в
Рис. 87. Структурная -tf ) т схема установки для сня- Г
тия точностных характе- Пр
ристик круговых индук- 1
I тосинов
начальном положении приемника СС в нуль при всех последующих остановках машины будет давать нулевой код. Вследствие погрешностей машины, проверяемого датчика, приемника СС, кинематической цепп от КПУ до приемника СС и, наконец, самого КПУ значения кодов будут отличаться от нуля на некоторую величину, которая и будет представлять собой суммарную погрешность перечисленных устройств.
Специальное командное устройство, установленное в кинематической цепи привода машины, в периоды установки машины производит считывание кода погрешности с КПУ и его регистрацию на перфоленту с помощью перфоратора ПЛ-20.
Аналоговую точность определения поля погрешности можно оценить для датчика с р=128 в 1,6-1,9 , для р=180 1,3-1,6 и р=2б6 1,2-1,5 .
При исследовании миогополюсных датчиков значительный практический интерес представляет изменение характера погрешности от периода к периоду. При этом в рассматриваемой измерительной системе погрешность редуктора и приемника, повторяясь без изменений от периода к периоду, не искажает характера изменения отдельных составляющих внутрипериодной погрешности датчика.
Программа обработки погрешности на ЭВМ включает в себя: а) контроль плавности еле оваиия погрешности, чем исключается возможность сбоев;
б) определение размаха погрешности;
в) построение гистограммы распределения плотности погрешности, что в некоторых случаях необходимо для анализа погрешностей систем, включающих датчик;
г) определение амплитуды постоянной составляющей и амплитуд синусной и косинусной составляющих первой и второй гармоник внутрипериодной погрешности;
д) определение полноты описания кривой внутрипериодной погрешности указанными пятью составляющими;
е) построение с помощью штатного выходного устройства ЭВМ графиков указанных погрешностей.
Полнота описания определяется как средняя квадратическая абсолютная разность между зарегистрированными значениями при измерениях и значениями кривой в этих же точках, синтезированной по вычисленным, указанным выше пяти составляющим.
Вычисление амплитуд гармоники производится по формулам Бесселя для тригонометрической интерполяции. Как показывают расчеты и опыт работы с установкой, достаточно брать 12-16 точек на период датчика.
Поскольку погрешность делительной машины имеет, как правило, плавный характер, ее характеристика может быть введена в память ЭВМ для учета при определении амплитуды длииноне-риодиой погрешности индуктосина. Описанная установка удобна для исследовательской лаборатории, однако в цеховых условиях при серийном или крупносерийном производстве она неэффективна из-за большого времени проверки. Наиболее целесообразна в этом случае установка, где проверка индуктосинов осуществляется сравнением с условным эталоном. Однако при проверке датчиков в амплитудном режиме возникают те же трудности, которые имеют место в трансформаторных синхронноследящих системах на основе индуктосина.
Как известно, при трансформаторном сбедйненин одинаковых фащающихся трансформаторов сигнал рассогласования пропор-шонален квадрату коэффициента трансформации. Поскольку у [ндуктосина коэффициент трансформации составляет величины [орядка (1-5) lO при трансформаторной схеме включения гндуктосинов максимально возможный сигнал рассогласования не [ревосходит 10-12 мкВ, а сигнал ошибки будет измеряться со-ыми и тысячными долями микровольта. Выделить такой сигнал (а фоне шумов крайне сложно.
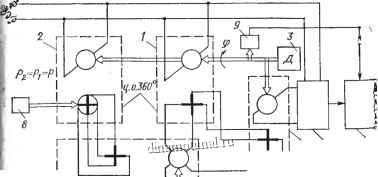
Схема установки для проверки индуктосина, в которой эта рЗдаОсть ТГрбдблёна, представлена па рис. 88.
Установка состоит из эталонного 1 и проверяемого 2 датчиков, сдвижные части (роторы) которых соединены вместе и приво-ятся в движение двигателем 3. В кинематической цепи привода становлен синусно-косинусный вращающийся трансформатор СКВТ) 4 на оси с ценой оборота 360 /р. Обмотки возбуждения роверяемого и эталонного датчиков подключены к источнику пе-еменного напряжения. Вторичные обмотки проверяемого датчика
по схеме трансформаторного включения подключены к первичным бмоткам дифференциального СКВТ 5 с коэффициентом транс-юрмации, равным единице (наличие СКВТ принципиально не (Обязательно, он используется лишь для облегчения согласования 1нулей проверяемого и эталонного датчиков внутри периода точ-юго отсчета). Вторично обмотки эталонного датчика соединены юследовательно с вторичными обмотками СКВТ 5 и подключены ; обмоткам СКВТ 4. Вторичная обмотка трансформатора 4 под-слючена к фазовому детектору 6, выход которого подключен к зегистрирующему устройству 7. Статор проверяемого датчика 1 аожет быть установлен на поворотном устройстве 8, например делительной головке. В кинематической цепи привода может .быть установлен датчик меток 9, соединенный с регистрирующим устройством 7.
Принцип работы устройства аналогичен принципу работы синхронно-следящей системы (см. рис. 16).
i Ll l(.o.S60yP
Рис.
88. Схема установки для проверки индуктосина амплитудным методом сравнения с эталоном: Ц. О. - цена оборота
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 [ 41 ] 42 43 44 45 46 47 48 49 |




