 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Прецизионные датчики, индукция
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 [ 40 ] 41 42 43 44 45 46 47 48 49
19. КОНТРОЛЬ ТОЧНОСТИ
Одним из важных этапов при разработке И йзтотобленйи прецизионных датчиков угла является контроль их точности.
При аттестации индуктосинов, точность которых составляет единицы угловых секунд, возникают затруднения.
Принято считать, что для достоверной аттестации точность измерительных инструментов должна быть, как минимум, на порядок выше точности самих датчиков, т. е. должна составлять доли угловой секунды. Измерительные устройства такого класса крайне дороги и редки. Проблема усложняется и тем, что в связи со сложным спектральным составом погрешности индуктосина для его достоверной аттестации требуется выполнение весьма большого числа измерений. Так, при р=180 и измерении погрешности в 8-12 точках внутри каждого периода повторения информации общее число измерений составляет около 2 Ш *. 1 акое число изме-рениий необходимо для оценки спектрального состава погрешности и для аттестации датчика по предельной погрешности с вероятностью 30 (0,9973). В этом случае треб,уется по крайней мере не менее 1000 измерений.
Теоретический анализ технологических погрешностей индуктосина и опыт практической работы с ними показывает, что погрешность индуктосина с секторными обмотками может быть практически полностью определена (с точностью до 0,1-0,15 ) следующим выражением:
6 (ф) = бо + 1 sin (Ф -f 11)) -f fiis sin pf + 8j c cos РФ -t-
+ sin 2pp + 62c cos 2/7Ф. (87)
Величины 6is, 62s, 6ic, 62c сами являются функциями угла по- ворота, а 6о определяется началом отсчета. В случае, если при проектировании были приняты недостаточные меры для подавления высших пространственных гармоник, в спектре погрешности обнаруживаются составляющие вида 64s sin 4рф и 64с cos 4рф. Обе этих составляющих определяются третьей и пятой высшими пространственными гармониками. Как было выяснено в гл. III, основные технологические погрешности индуктосина - неплоскостность токопроводящих слоев и неточность выполнения угловых размеров обмоток - приводят к появлению в составе выходных ЭДС гармоник порядка pi Л/ (где N - число секторов в фазе); их наличие проявляется в виде амплитудной и пространственной фазовой модуляции сигналов фаз, т. е. в виде переменной от периода к периоду неортогональности фаз у двухфазного датчика и неравенства амплитуд фаз. В свою очередь, это явление вызывает погрешности вида sin 2рф и cos 2рф. Составляющие вида sin рф и cos РФ в выражении (87) обусловлены паразитными наводками рабочей частоты и проявляются как неравенство соседних положительного и отрицательного максимумов одной и той же фазы.
Составляющая вида б181п(ф-)-я])) определяется погрешностями монтажа. Приближенно значения 61, 8и, бю, 62s, 62с можно, таким образом, определить, ие измеряя погрешности внутри периода повторения, а определяя лишь угловое расположение нулевых точек фаз. На этом основан простейший способ определения погрешности датчика, требующий минимального оборудования.
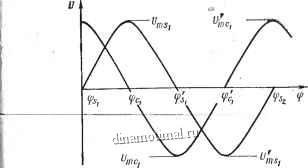
Рис. 86. Функции выходных ЭДС фаз
На основании рнс. 86, где изображены функции выходных ЭДС )аз, можно определить относительную величину наводки, относительное неравенство амплитуд и иеортогональность из следующих (ыражений:
6U,i =
msi + tmst
Ш,1 =
6U,a = 1
mci + ,nci
и mci + U
6G( =
2p L
-mci i ~ nwl
(88)
(89)
(90)
(91)
здесь bUeu SUci - относительное значение наводки в фазах в 1-м периоде; 6Usci - относительное неравенство амплитуд в (-м пе-)иоде; 60 raquo; - неортогональность фаз в (-м периоде. Текущее значение величины 6o+6iSin(9-f-iJ)) определяется выражением
-Г {fsC + Psi + Ф laquo; + Ф -) + -- - - (-
)
(92)
В связи с тем, что, как правпло, определение амплитуд может производиться с меньшей точностью, чем фиксация нуля с помо-ью угломерного инструмента, относительную наводку можно определять, также используя угловые величины
2ф5 -[Ф5(/--1) + Ф5г]
2ф.г-[Фс(Н1) + Ф laquo;1 с{=---.
Величины file, 6ic, 62s, 62с связаны с выражениями -(88)-(91) следующим образом:
Проверка датчика требует минимума оборудования. Фиксация нуля и измерение амплитуд может производиты;я с помощью микровольтметра типа У2-6 (28 ИМ) на узкой полосе частот. При этом возможна отметка нуля с точностью до 1 мкВ, что при р=180 и Um~3 мВ соответствует примерно 0,4 . Измерение амплитуды возможно с точностью 0,1%, что соответствует примерно I .
Недостатком изложенного способа является прежде всего необ ходимость использования угломерного инструмента высокой разрешающей способности, поскольку значения (88)-(91) определяются всего лишь по двум-четырем измерениям и вес случайной ошибки в определении, фг оказывается велик.
Кроме того, указанным способом можно оценивать лишь отдельные составляющие; определить предельную ошибку датчика и ее статистические характеристики можно путем сложных вычислений. Наконец, способ не позволяет выделить погрешность, обуслов ленную несинусоидальностью функций Us и Uc.
Для определения погрешности датчика в любой точке окружности в амплитудном режиме может быть использована схема с вращающимися трансформатором типа ВТ-5 по следующей схеме. Индуктосин устанавливают на точный угломерный инструмент; ВТ-5 - на угломерный инструмент невысокой точности порядка 0,6-Г. Подвижную часть индуктосина последовательно устанавливают на необходимые углы фь фг, фз ... Ротор ВТ-5 поворачивают каждый раз до тех пор, пока выходной сигнал не становятся равным нулю. В идеальном случае эти углы должны быть равными рфь рф2, рфз и т. д. Если разность между этими углами и измеренными по угломерному инструменту, на котором установлен ВТ-5, составляет 61, 62, 63. бп, то погрешность датчика определяется значениями 6i/p, 62/р, amp;з/р. -, 8п1р, а погрешность измерения-по формуле
6изм=
laquo;2 laquo;2
+60ТСЧ+6;
инстр
где бвт - погрешность ВТ-5; буи - погрешность угломерного инструмента с ВТ-5; ботсч - отсчета по нуль-индикатору; бинстр- погрешность угломерного инструмента с иидуктосином. Если 6вт = =40 , бу =30 , ботсч~0,4 и бинстр~0,5 , то при р=180 погрешность, вносимая в измеренпя, составит около 0,7 .
Вместо угломерного инструмента угол поворота ВТ может задаваться с помощью шкального устройства с несколькими шка-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 [ 40 ] 41 42 43 44 45 46 47 48 49 |




