 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Прецизионные датчики, индукция
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 [ 35 ] 36 37 38 39 40 41 42 43 44 45 46 47 48 49
Однако необходимо иметь в виду, что прн использовании сопряжения двухфазной обмотки (см. рнс. 8) и двухслойной вторичной обмотки расчет допусков на параметры обмотки по рис. 8 необходимо -производить из условия допустимого изменения несимметрии в функции зазора, так как фильтр обратной последовательности в общем случае не компенсирует составляющую с обратным вращением фазы, если ее относительное содержание в двух выходных обмотках различ1юе. Из этих же соображений вторичные обмотки должны печататься с одного и того же фотошаблона, в противном случае даже незначительная разница нерадиальности проводников вторичных обмоток приводит к неодинаковой неортогональ- ности вторичной системы по отношению к каждой из первичных обмоток, также не поддающейся компенсации с помошью Лильтра обратной последовательности.
Вообще, в любом случае предпочтительнее иметь малое расстояние между слоями - как для первичных, так и для вторичных обмоток.
Проведенный анализ свидетельствует о большой перспективности датчиков угла с многослойными печатными обмотками.
Сформулируем основные достоинства многослойных обмоток.
1. При разделении однослойной обмотки значительной толщины на многослойную каждый слой может выполняться с большей точностью.
2. Появляются дополнительные возможности для компенсации тангенциальных составляющих токов (лобовых частей) и улучшения формы поля путем взаимного углового сдвига слоев.
3. Для секторных многослойных обмоток появляются возможности усиления интегрального эффекта за счет уменьшения в среднем относительных обмоточных коэффициентов для паразитных некратных гармоник.
4. Для датчиков, предназначенных для использования в режиме фазовращателя с фильтром обратной последовательности, появляется возможность создания двухфазных систем на роторе и статоре с бессекторными обмотками с приемлемой несимметрией и практически нечувствительных к малой неплоскостности и малым угловым погрешностям в расположении и ширине проводников.
ГЛАВА IV.
КОНСТРУКЦИЯ и ТЕХНОЛОГИЯ ПРОИЗВОДСТВА
16. КОНСТРУКЦИЯ КРУГОВЫХ ИНДУКТОСННОВ
Известны два основных варианта конструкции кругового индуктосина. Первым из них является так называемая единая сборка (корпусное исполнение), когда датчик имеет собственные подшипники н соединяется с валом, угловое .положение которого измеряется с помощью точной муфты - Ольдгейма или сильфонной.
Вторым вариантом является так называемая раздельная сборка (бескорпусное исполнение), когда ротор и статор датчика не связаны непосредственно друг с другом и устанавливаются раздельно. Оба варианта имеют свои достоинства и недостатки.
Единая сборка имеет следующие достоинства:
а) возможность при сборке датчика использовать цеховое оборудование и приспособления любой сложности, так как точность датчика существенно зависит от точности центровки обмоток;
б) возможность окончательной аттестации датчика по точности в условиях цеха-изготовителя и возможность отказаться от дополнительной проверки Б изделии, куда он входит как комплектующий элемент;
в) возможность измерения углов поворота валов, имеющих значительные радиальные биения и перекосы.
К недостаткам конструкции такого типа относится: а) ухудшение точности за счет дополнительной погрешности муфты;
б) повышенные осевые габаритные размеры из-за необходимости обеспечить достаточную базу для подшипников;
в) пониженная устойчивость к вибрационным и ударным нагрузкам. На р laquo;с. 74 приведен вариант конструкции кругового индук-сина типа единой сборкн по патенту США № 2.844.802. Обмотки выполнены на стеклянных дисках. Основными деталями датчика являются массивный литой корпус 2 и статор 9, крепящийся к корпусу винтами / и имеющий возможность перемещаться в радиальном направлении для исключения эксцентриситета с помощью трех регулировочных винтов 8. С валом, перемещение которого измеряется, датчик связывается с помощью цангового разрезного зажима , соединяющегося через первую сильфонную муфту 10 с внутренним валом 5. Главный вал индуктосина б - полый, сидпт в подшипниках 3 и несет ротор 12 и коллектор 4. Таким образом, главный вал индуктосина 6 связан с валом изделия через два сильфона к ие подвергается риску грубых воздействий. На внутреннем валу 5 установлен поводок 7 для присоединения датчика грубого отсчета. Хотя рис. 74 - лишь схема конструкции, иллюстрирующая патент-
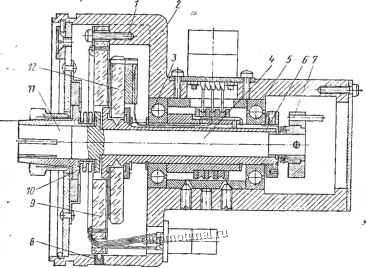
Рис. 74. Конструкция индуктосина типа единой сборки
ную формулу, из него следует, что главные детали - ротор и статор- занимают весьма малый объем в общем объеме датчика типа единой сборки, и, главное, плохо используется диаметральный размер: внещний диаметр обмотки ротора лищь несколько больше половины диаметра датчика. Одной из разновидностей единой конструкции является так называемая консольная (gimbal mounted) конструкция индуктосина, которая, как сообщает рекламный бюллетень американской фирмы Del Electronics, применяется в гироинер-циальных корабельных системах. В такой конструкции индуктосин соединен в единую сборку с крупным силовым прецизионным под-щипнпком. В таком виде датчик проверяют, паспортизируют и подставляют на монтаж. С цапфой гирорамы вал индуктосина-подщип-ника соединяется с помощью глухой муфты.
. Наибольщее распространение получила, однако, конструкция типа раздельной сборки. Ротор датчика в этом случае устанавливают laquo;а консоль вала, угловое положение которого подлежит измере- нию, статор крепят к корпусу основного изделия. К достоинствам конструкции относятся:
а) повышенная по сравнению с единой сборкой точность за счет отсутствия муфт и поводков;
б) малый осевой габаритный размер;
в) более простая конструкция и меньшая стоимость. К недостаткам такой конструкции можно отнести, во-первых,
определенные трудности совмещения центров обмоток ротора и :татора с осью вращения вала, во-вторых, необходимостью повторного контроля непосредственно в изделии, что является, как Правило, трудоемкой и неудобной операцией, причем точность этих змерений подчас низка и соизмерима с точностью самого датчика.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 [ 35 ] 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |




