 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Прецизионные датчики, индукция
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [ 28 ] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 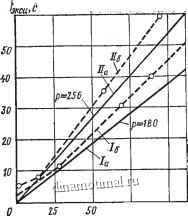
7s mill-10
Рис. 64. Погрешность индуктосина от неточности монтажа
Так как Vp й Vcслучай-ные величины, то рассмотрим наиболее неблагоприятный случай:
7р -7с = эт;
Тогда раз.мах погрешности
бэлтах = (*]рЯс + + ticKp) эл.рад.
Для оценки уровня погрешности положим tip=tic=ti и
Тогда
Ир = Хс = X.
бэлтах = 2р2Я
Итак, для полностью гарантированного датчика достаточно выполнить условие
Для получения истинной, fed метрической погрешности кай известно, бэа max необходимо разделить на р:
бгеомтах РЩ РаД- (66) обеспечения точности
2р *
Переходя к абсолютным величинам и выражая б в секундах, Получим
10-= .
(67)
Так, для р=180 и /?ср=36 мм для получения погрешности от эксцентриситета и торцового биения на уровне 1 (в размахе)
О 24.1.1296 г с
--10-S = 1,7.10-5 -.
Отсюда е= lt;=0,004 мм.
На рис. 64 показаны результаты экспериментальной проверки изложенной теории.
Датчики с параметрами р=256, D=112 мм, rf=G8 (кривые 1а и 16) и р=1в0, Ь=112 мм, rf=68 мм (кривые Па и Пб) устанавливались на специальной плите, позволяющей создать фиксированные значения радиальных эксцентриситетов и торцовых биений. Измерялась погрешность laquo;по нулям raquo;. Штриховые кривые - экспериментальные; сплошные - расчетные. По оси х отложено значение
1 = КПр с + - 2т1рТ1сХрХс cos (Vp -vc)
Рассмотрим теперь дополнительную погрешность от эксцентриситета, обусловленную секторностью обмотки.
В связи с тем, что фазы секторной обмотки имеют пространственный сдвиг It/TV, фазовая и амплитудная пространственные модуляции сигнала также имеют соответствуюший фазовый сдвиг. Это приводит к переменному неравенству амплитуд сигналов фаз и переменной неортогональности функций взаимоиндукции. Поэтому сигналы фаз могут быть представлены в следующей приближенной форме:
ф1 = Ефт (1 - laquo;а cos ф) sin {р [ф + Шф sin (ф + ф)]};
Еф2 - фт
Ф 4- Шф sin
1 - та COS | |
4 у |
XCOS р
+4 +
(68)
где та н Шф - индексы амплитудной и фазовой модуляции.
Можно показать, что при таком искажении сигналов фаз погрешность измерения угла будет иметь вид
6(ф) =
sin rrr sin ф- sin 2рф + Шф sin sin (ф +1
+ 2тф sin (ф + Ф) cos
2N п N
I cos 2рф + (69)
Здесь ф в функциях sin ф и 51п(ф+11)) дан с точностью до постоянного слагаемого.
Первые два слагаемых в выражении (69) представляют собой дополнительную погрешность. Она имеет вид гармоник порядка 2р, промодулированных по амплитуде с периодом 2л.
Дополнительная погрешность, обусловленная амплитудной модуляцией (размах).
6а = pilpTlc sin геом. рад
(70)
Погрешность от фазовой модуляции бф = р sin - j/ti laquo;2 + ti laquo;2 - 2ripTic Ир ис cos (Yp - Yc) (71) Так, при т1р=Т1с=Ир=Ис=5-10-; Yp=Vc = 3X р=180 и N=8
ба=вф = 3,6 .
Снизить эту погрешность, как следует из формул (70) и (7Ь. можно, увеличив число секторов в фазе.
Погрешность монтажа является наиболее распространенной технологической погрешностью, особенно для конструкций индуктосина типа раздельной сборки (бескорпусное исполнение). В ряде случаев избежать эксцентриситета и перекоса осей невозможно (переменные механические нагрузки при недостаточной жесткости валов и опор). В этих случаях обычная торцовая система может оказаться неприемлемой-
-ПОЛП. nDЛH.
Можно предложить два пути обеспечения высокой точности из-/ мерения угла при наличии даже значительных погрешностей монтажа. Первый из них состоит в использовании так называемой разделенной торцовой системы [27]. Учитывая, что фазовая модуляция в двух диаметрально расположенных витках имеет противоположные знаки и проводя; измерение угла отдельно для каждого витка, а полученные результаты осредияя, получим, что югрешность эксцентриситета
лрактически полностью исключается.
В этом случае амплитудная модуляция уже не может влиять иа результат. Практически для обеспечения приемлемого уровня сигнала приходится брать ие единичный виток, а группу витков.. (Каждая такая группа должна представлять собой многофазную систему). При этом эффект компенсации погрешности эксцентриситета ослабляется. Можно показать, что если сектор занимает угол Он, то погрешность результата после осреднения, выражается следующей формулой:
st 3st/Z а.
Рис. 65. Чувствительность разделенной торцовой системы к погрешностям монтажа
4 а \
(72)
где бдолн - погрешность монтажа обычной системы, занимающей полный круг.
На рис. 65 показана кривая отношения погрешности разделенной торцовой системы к погрешности обычной системы бср/бцоли (кривая /). Прямая 2 характеризует снижение сигнала. Так, прн я
выборе = чувствительность к погрешностям монтажа снижается более чем в 20 раз.
При построении преобразователя угол -код на основе такого датчика можно использовать коммутацию сигналов секторов и последовательную обработку сигнала, либо для сокращения времени Преобразования - удвоение преобразователя.
Наиболее простой оказывается реализация измерительной следящей системы. В линию связи датчик - приемник устанавливаю г коммутаторы сигналов фаз. Если частота коммутации будет намного выше частоты сигнала индуктосина, то не возникает необходи мости изменять что-либо в усилителе рассогласования (кроме коэффициента усиления).
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [ 28 ] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |




