 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Прецизионные датчики, индукция
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 [ 27 ] 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
в работе [17] показано, что для реальных значений р, ер и вс действием факторов а и б можно пренебречь.
Таким образом, если ЭДС, индуктируемую в проводнике статора, находящемся над проводником ротора, в котором ток течет условно от центра к периферии, принять за ео, то тогда ЭДС, индуктируемую в фазе с учетом соединения проводников, можно записать в виде
N-\ 2г-1
Ч (Ф) = 0 Ц У] (- ( Р / )] 11.i 1 = 0 i=0
Здесь Gj, 3 определяет угловое положение проводника номер i сектора номер / статорной обмотки по отношению к нулевому проводнику роторной обмотки. Величина V[h{(p, I, /)] определяет относительное изменение ЭДС проводника (, / вследствие переменного зазора. Так как поворот определяется углом ф, а ЭДС углом Gi. j, то необходимо определить зависимость между ф и Qt -. Для этого рассмотрим четырехугольник OfOOzQ, образованный центром вращения, геометрическими центрами обмоток и серединой проводника /, / (рис. 63).
Очевидно, что проводники i, / отстоят от нулевого проводника ротора на угол
Проектируя стороны четырехугольника на оси х и у, получим
Rep sinPj-СрБшф Rep cos Рг /-ерсозф-!-ее
ег./ = ф-arc tg;
Переходя
к Tl tlp = -
(61)
упрощая выражение
Rc-p ср
(61) с точностью до т]2, получим
{.i = f - Pj./ + [Р sin Ф-cos Р,- J - (tip cos Ф - tic) sin p,. y]
Выражение в квадратных скобках обозначим ог, э и представим как
j = f sin ф1 + ).
здесь
/ = 7/p+tlc-2tlptlcCosф ; Итак,
(62)
ф = arc tg
tip sm ф
tip cos Ф -Ь t]c
е.-. / = Ф-Р,-,/ - f sin (pJ, -
(63)
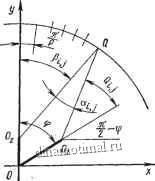
Рис. 63. К определению связи между Ф и 6и
Обратимся теперь к функции V=[rt(rp, /, /)], определяющей относительное значение проводниковой ЭДС от измерения зазора. В гл. Ill показано, что выходная ЭДС индуктосина
а значит, относительное изменение ЭДС при вариации зазора
(-)-
Это будет справедливо и для проводниковой ЭДС, если 6ft по
окружности изменяется достаточно плавно. В связи с тем, что б/г
для практических случаев достаточно мало, в разложении 6V по степеням 6ft можно ограничиться двумя членами.
Тогда
D + d
Остается определить б/г для проводника /, / статора. Из рнс. 62 и сказанного ранее следует, что
6Л = tc sin (Pi j - Ус) - lt;p sin (в I - Vp),
где tc и lt;p - перекосы плоскостей статора и ротора, измеренные иа среднем диаметре.
Здесь ур и Ус - углы между направлением OOi и ААх, 00 и ВВ, соответственно. Используя ранее принятые обозначения, получим
V = 1 + рхр sin (Р. - Ус) + рир sin (Gj - Vp). Таким образом, ЭДС фазы может быть поепставлена как
n-1 2г-1
Еф = еоУ] У] (- 1) [1 - рхс sin (Р,. . - ус) + ркс sin (6,- . -
/=о f=0
- Yp)] cos р [ф р. . f sin (р. - ф)], где ир = --!, ис=--.
ср ср
Суммирование производится без особых затруднений и для N gt;4 и малых т] и и, значение ЭДС этой фазы описывается следующим приближенным выражением:
Еф --= фт {/о {pf) cos РФ - Il (pf) [ис cos (vc - ilJ) + + Ир cos p (ф Vp - il))] sin РФ),
где lo(pf) и /i (p/)-функции Бесселя соответственно нулевого и первого порядка; как известно, для малых значений аргумента
p2f2 1
loiPDi----, amp; lApf)-pl
в идеальном блучае ЕфЕфт cos рф; ййлмт Синусоидальной ебставляющей искажает функцию ЭДС, модулируя ее по фазе и амплитуде (в функции угла).
Поскольку для нас практический интерес имеет случай малых Г] Я И, то тогда 1в(р!), будучи близким к единице, существенно больше коэффициента при sinprp и справедливо следующее приближенное равенство:
Еф к Яфшо (Pf) cos [рф + 6 (ф)];
6 (ф) = p/j {pf) [ис cos {ус - ф) + Ир cos (Vp - Ф + ] (64)
Хпри условии, что р(г\Тги)Ж1 у.
Если учесть выражения (62) и (63), равенство (64) преобразуется к виду
S (Ф) = Y УР +РсЯрЯс cos (Vp - vc) X
X sin (ф -~ amp;с)+~ РР Р ~
(65)
Здесь бо-некоторый постоянный угол, зависящий от т]р, т]с, Ир, Ис, Yp. Yc
Таким образом, влияние малых радиальных эксцентриситетов и неперпендикулярностей плоскостей обмоток оси вращения ротора на выходную ЭДС датчика сводится к следующему:
а) при наличии лишь радиальных эксцентриситетов имеет место амплитудная модуляция выходной ЭДС по углу с периодом 2я и глубиной ЦрЦср; причем если эксцентриситет есть лишь у одной
рт]
обмотки, то происходит простое снижение выходной ЭДС на--
относительных единиц, и амплитудная модуляция отсутствует. Фазовая модуляция, определяющая погрешность датчика, в этом случае практически также отсутствует;
б) при наличии радиальных эксцентриситетов и неперпендикулярности плоскостей обмоток датчика оси вращения имеет место как амплитудная модуляция, так и фазовая, причем полный размах погрешности дат1шка (в электрических радианах)
6 (ф) = р2 Уг\ к1 -\- ti х2- 2г]рТ1сИрИс cos (Vp - Vc)
В том случае, если неточно установлена лишь одна обмотка, то имеет место постоянное снижение выходной ЭДС и постоянный фазовый сдвиг в соответствии с выражением (65).
Отметим, что сказанное справедливо для обмоток со сравнительно большим числом секторов (W6-8) и для малых т] так, что
% + % lt; 1/р-
При этих условиях отмеченные изменения в фазных ЭДС практически одинаковы в обеих фазах. При малом числе секторов функции амплитудной и фазовой модуляции для обеих фаз отличаются, что вызывает дополнительную погрешность.
Определим теперь требования к точности установки обмоток датчика для обеспечения нужной точности.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 [ 27 ] 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |




