 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Прецизионные датчики, индукция
1 2 3 4 5 6 7 8 9 10 11 12 13 [ 14 ] 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
Таблица 3
Таблица фазовых погрешностей схем ФВ с пульсирующим полем
Тип схемы ФВ
II III
многофазный
двухфазный
двухфазный дифференциальный
двухфазный с двумя обмотками возбуждения
I Л I sin arg А -f
G | ||
2 | ||
ДО; ДОг С
ДОг N
у sin 2р(р
ДО, - AGj
AOj + AgI +--sin 2РФ
AG i - ДОз
- У Aa,+ lBsinargB +
2 laquo;; laquo; *
X sin
arg 2 Дйге lt;*+= -2рф \ /=1
~ (Да; + Да;) -f -j- (Да - Да.2) cos 2рф
Да + Дсс
Да, - Да2 +-7,-cos РФ
Аа\ + До
[продолжение табл. 3
Тип схемы ФВ
Ч amp;1
многофазный
двухфазный
двухфазный Дифференциальный
двухфазный с двумя обмотками возбуждения
- - е sin X
AZ, Z=i
/ га
А2, - Д22
--sin 2рф
A2i-AZ, .
51п2рф
X sin
argy Ар;е№- )-2рф
Ар; -f др;
Ар;-др;
- COS РФ
-др;+Ар;
2 +
Ар;-Ар;
-f-г-COS РФ
др; + др2
Примечание. А = -
Да;е/(а/-1-л/2)
В = -
т
+ V е
Рис. 35. Двухфазный ФВ с пульсирующим полем
Рис. 36. Двухфазный ФВ с пульсирующим, разнонаправленным движением фаз выходных напряжений
ность данной схемы в первом приближении не зависит от изменения параметров фазосдвигающих цепей и частоты питания. Следует отметить, что практическая реализация такого ФВ на ни дуктосине затруднена из-за невозможности иметь в данной схеме общую точку выходных обмоток.
Схема ФВ, позволяющая исключить из погрешности составляющую, обусловленную конечной проводимостью выходных обмоток индуктосина, приведена на рис. 38. По составу погрешностей, характеру их зависимости от изменения параметров элементов и частоты питания эта схема аналогична простейшей схеме ФВ с пульсирующим полем (рис. 35). Основное преимущество схемы состоит в том, что она позволяет использовать относительно низ-коомные элементы в фазосдвигающих цепях.
Схема ФВ с пульсирующим полем повышенной точности, построенная на индуктосине с двумя парами перпендикулярных обмоток возбуждения и выходных обмоток, приведена на рис. 39. Угол поворота ротора индуктосина оценивается как среднее арифметическое результатов двух измерений фаз выходного сигнала при различных поло!жениях переключателя, который подключает поочередно источник питания к обмоткам возбуждения. Поскольку обмотки возбуждения смещены относительно друг друга на четверть периода, то нх попеременное подключение к источнику пи-
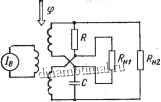
Рис. 37. Усовершенствованный вариант ФВ
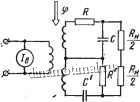
Рис. 38. ФВ с компенсацией погрешности, обусловленной конечным сопротивлением выходных обмоток
| 1 2 3 4 5 6 7 8 9 10 11 12 13 [ 14 ] 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |




